Hinweise zur Durchführung von Messungen in Modenverwirbelungskammern¶
Allgemeines¶
Alle Programmroutinen, die zur Steuerung der Geräte oder zum Erfassen und Auswerten von Messdaten erforderlich sind, sind in der entwickelten Software integriert. Diese wurde in der Programmiersprache Python (http://www.python.org/) geschrieben.
In die hinterlegten Geräteklassen können jederzeit neue Geräte integriert werden, falls einmal der Messaufbau erweitert werden sollte. Somit wird für die einzelnen Messungen jeweils nur ein relativ kurzes Programm benötigt, welches die jeweils notwendigen Routinen aufruft. Diesem Programm wird als Parameter beim Aufruf eine kleine Konfigurationsdatei, die ebenfalls in Python geschrieben wurde, übergeben. Diese Konfigurationsdatei wird für jede einzelne Messung benötigt. Der Name der Kondfigurationsdatei beginnt aus Übersichtsgründen mit conf_. In ihr sind alle für die Messung notwendigen Parameter, wie Messbereich, Schrittweite oder die Anzahl der zu untersuchenden Tunerpositionen enthalten, die dann während der einzelnen Funktionsaufrufe jeweils an die Routinen übergeben werden.
Bei Störfestigkeitsmessungen ist es sinnvoll (wenn es mit nicht allzu großem Aufwand realisierbar ist) eine automatische Prüflingsüberwachung im Programmablauf zu integrieren.
Es empfiehlt sich, für jede einzelne Messung einen seperaten Ordner anzulegen. Dieser Ordner muss das gewünschte Messprogramm sowie die Kofigurationsdatei enthalten, Weiterhin kann eine .dot Datei in diesem Ordner abgelegt werden, in der der Messaufbau definiert wird und auf die noch näher eingegangen wird. Werden Messserien aufgenommen, bei denen sich der Messaufbau nicht ändert, kann die .dot Datei auch zentral abgelegt werden und der Pfad in der Konfigurationsdatei entsprechend angepasst werden (mehr dazu später im Beispiel). In diesen Ordner werden während der Messungen auch die Ergebnisse und andere Dateien gespeichert, auf die später noch näher eingegangen wird.
Die übrigen Programmroutinen, Gerätetreiber und die Initialisierungsdateien müssen nicht mit kopiert werden, da die Pfade zu deren Speicherorten als globale Variablen hinterlegt sind. Somit hat man abschließend für jede Messung seperate Ordner mit allen für diese Messung relevanten Daten.
Zunächst wird ebenfalls durch das aufrufende Messprogramm eine Instanz
der Klasse MSC erzeugt. Diese wird entweder neu oder aus bereits
vorhanden Sicherungsdateien (pickle files) erstellt. Die MSC Klasse ist für die
Kommunikation mit den Messgeräten, die Messung und die Auswertung der
Messdaten zuständig.
Dieser Instanz werden die Messparameter measurement_parameters und Auswerteparameter evaluation_parameters übergeben und sie führt dann die entsprechenden Befehle oder Messroutinen durch, legt Autosavedateien an und gibt nach erfolgter Messung die Rohdaten und nach beendeter Auswertung die ausgewerteten Daten aus.
Den Aufbau der Messung, also die verwendeten Geräte und die Signalwege, erhält die Klasse durch Auswertung der .dot Datei.
Anschließend wird der gesamte Stand der abgeschlossenen Messungen in einem pickle file gespeichert. Das Pickling stellt einen sehr hilfreichen und nützlichen Algorithmus dar, mit dem sich strukturierte Datenobjekte zu einer Bytefolge “serialisieren” und dann in einer Datei abspeichern lassen. Diese Datei lässt sich später wieder laden und zur ursprünglichen Datenstruktur zurückwandeln. Dies ist nützlich, um beispielsweise an bestimmten Stellen das Messprogramm anzuhalten und den momentanen Zustand sozusagen “einzufrieren” und später mit weiteren Messungen fortsetzen zu können mit dem Vorteil, dass alle vorherigen Operationen und Befehle immer noch protokolliert und nachvollziehbar sind, da die Instanz der Klasse ja immer noch besteht.
Der Messgraph¶
Vor Beginn der Messungen muss der Messaufbau definiert werden. Diese Daten benötigt die Messsoftware, um die aufgenommenen Daten auswerten zu können. Die Beschreibung des Messaufbaus erfolgt mit Hilfe eines Graphen. In einer Datei mit der Endung .dot ist der Messaufbau in Textform hinterlegt. Ein Beispiel für eine solche .dot Datei ist:
digraph {
node [fontsize=12];
graph [fontsize=12];
edge [fontsize=10];
rankdir=LR;
cbl_sg_amp [ini="M:\\umd-config\\smallMSC\\ini\\cbl_sg_amp.ini" condition="10e6 <= f <= 18e9"] [color=white, fontcolor=white ]
cbl_amp_ant [ini="M:\\umd-config\\smallMSC\\ini\\cbl_amp_ant.ini" condition="10e6 <= f <= 4.2e9"] [color=white, fontcolor=white ]
cbl_amp_pm1 [ini="M:\\umd-config\\smallMSC\\ini\\cbl_amp_pm1.ini" condition="10e6 <= f <= 4.2e9"] [color=white, fontcolor=white ]
sg [ini="M:\\umd-config\\smallMSC\\ini\\umd-gt-12000A-real.ini"] [style=filled,color=lightgrey]
amp [ini="M:\\umd-config\\smallMSC\\ini\\umd-ar-100s1g4-3dB-real-remote.ini" condition="800e6 <= f <= 4.2e9"]
ant [ini="M:\\umd-config\\smallMSC\\ini\\umd-rs-HF906_04.ini"] [style=filled,color=lightgrey]
refant [ini="M:\\umd-config\\smallMSC\\ini\\umd-rs-HF906_03.ini"] [style=filled,color=lightgrey]
tuner [ini="M:\\umd-config\\smallMSC\\ini\\umd-sms60-real.ini" ch=1] [style=filled,color=lightgrey]
pmref [ini="M:\\umd-config\\smallMSC\\ini\\umd-rs-nrvd-2-real.ini" ch=2] [style=filled,color=lightgrey]
pm1 [ini="M:\\umd-config\\smallMSC\\ini\\umd-rs-nrvd-1-real.ini" ch=1] [style=filled,color=lightgrey]
pm2 [ini="M:\\umd-config\\smallMSC\\ini\\umd-rs-nrvd-1-real.ini" ch=2] [style=filled,color=lightgrey]
cbl_ant_pm2 [ini="M:\\umd-config\\smallMSC\\ini\\cbl_ant_pm2.ini" condition="10e6 <= f <= 4.2e9"] [color=white, fontcolor=white ]
cbl_r_pmr [ini="M:\\umd-config\\smallMSC\\ini\\cbl_r_pmr.ini" condition="10e6 <= f <= 18e9"] [color=white, fontcolor=white ]
att20 [ini="M:\\umd-config\\smallMSC\\ini\\att20-50W.ini" condition="10e6 <= f <= 18e9"] [color=white, fontcolor=white ]
a1 [style=filled,color=lightgrey]
a2 [style=filled,color=lightgrey]
subgraph cluster_amp {
label=amp
amp_in -> amp_out [dev=amp what="S21"]
}
sg -> a1 [dev=cbl_sg_amp what="S21"] [label="cbl_sg_amp"]
a1 -> amp_in
amp_out -> a2
a2 -> ant [dev=cbl_amp_ant what="S21"] [label="cbl_amp_ant"]
a2 -> pm1 [dev=cbl_amp_pm1 what="S21"] [label="cbl_amp_pm1"]
refant -> feedthru [dev=cbl_r_pmr what="S21"] [label="cbl_r_pmr"]
feedthru -> pmref [dev=att20 what="S21"] [label="att20"]
ant -> pm2 [dev=cbl_ant_pm2 what="S21"] [label="cbl_ant_pm2"]
subgraph "cluster_msc" {label=MSC; ant; refant}
subgraph "cluster_pmoutput" {label="output"; pm1; pm2; pmref;}
}
![digraph {
node [fontsize=12];
graph [fontsize=12];
edge [fontsize=10];
rankdir=LR;
cbl_sg_amp [ini="M:\\umd-config\\smallMSC\\ini\\cbl_sg_amp.ini" condition="10e6 <= f <= 18e9"] [color=white, fontcolor=white ]
cbl_amp_ant [ini="M:\\umd-config\\smallMSC\\ini\\cbl_amp_ant.ini" condition="10e6 <= f <= 4.2e9"] [color=white, fontcolor=white ]
cbl_amp_pm1 [ini="M:\\umd-config\\smallMSC\\ini\\cbl_amp_pm1.ini" condition="10e6 <= f <= 4.2e9"] [color=white, fontcolor=white ]
sg [ini="M:\\umd-config\\smallMSC\\ini\\umd-gt-12000A-real.ini"] [style=filled,color=lightgrey]
amp [ini="M:\\umd-config\\smallMSC\\ini\\umd-ar-100s1g4-3dB-real-remote.ini" condition="800e6 <= f <= 4.2e9"]
ant [ini="M:\\umd-config\\smallMSC\\ini\\umd-rs-HF906_04.ini"] [style=filled,color=lightgrey]
refant [ini="M:\\umd-config\\smallMSC\\ini\\umd-rs-HF906_03.ini"] [style=filled,color=lightgrey]
tuner [ini="M:\\umd-config\\smallMSC\\ini\\umd-sms60-real.ini" ch=1] [style=filled,color=lightgrey]
pmref [ini="M:\\umd-config\\smallMSC\\ini\\umd-rs-nrvd-2-real.ini" ch=2] [style=filled,color=lightgrey]
pm1 [ini="M:\\umd-config\\smallMSC\\ini\\umd-rs-nrvd-1-real.ini" ch=1] [style=filled,color=lightgrey]
pm2 [ini="M:\\umd-config\\smallMSC\\ini\\umd-rs-nrvd-1-real.ini" ch=2] [style=filled,color=lightgrey]
cbl_ant_pm2 [ini="M:\\umd-config\\smallMSC\\ini\\cbl_ant_pm2.ini" condition="10e6 <= f <= 4.2e9"] [color=white, fontcolor=white ]
cbl_r_pmr [ini="M:\\umd-config\\smallMSC\\ini\\cbl_r_pmr.ini" condition="10e6 <= f <= 18e9"] [color=white, fontcolor=white ]
att20 [ini="M:\\umd-config\\smallMSC\\ini\\att20-50W.ini" condition="10e6 <= f <= 18e9"] [color=white, fontcolor=white ]
a1 [style=filled,color=lightgrey]
a2 [style=filled,color=lightgrey]
subgraph cluster_amp {
label=amp
amp_in -> amp_out [dev=amp what="S21"]
}
sg -> a1 [dev=cbl_sg_amp what="S21"] [label="cbl_sg_amp"]
a1 -> amp_in
amp_out -> a2
a2 -> ant [dev=cbl_amp_ant what="S21"] [label="cbl_amp_ant"]
a2 -> pm1 [dev=cbl_amp_pm1 what="S21"] [label="cbl_amp_pm1"]
refant -> feedthru [dev=cbl_r_pmr what="S21"] [label="cbl_r_pmr"]
feedthru -> pmref [dev=att20 what="S21"] [label="att20"]
ant -> pm2 [dev=cbl_ant_pm2 what="S21"] [label="cbl_ant_pm2"]
subgraph "cluster_msc" {label=MSC; ant; refant}
subgraph "cluster_pmoutput" {label="output"; pm1; pm2; pmref;}
}](../_images/graphviz-ced8287733363cb924f2810dcfcf4f3968d3761a.png)
Als Beschreibungssprache für den Graphen wird DOT-language benutzt. Weitere Informationen zu dieser Spache sind unter http://www.graphviz.org/ zu finden.
Nach einigen globalen (optionalen) Anweisungen zur Graphenvisualisierung werden zunächst alle verwendeten Geräte und Kabel aufgelistet und somit als Knoten im Graphen definiert.
In unserem Beispielfall finden also ein Signalgenerator (sg), diverse Kabel (cbl), ein Abschwächer (att), ein Verstärker (amp), eine Sende- und eine Referenzantenne (ant), der Rührer (tuner) und einige Leistungsmesser (pm) Anwendung.
Die Kabel und der Abschwächer, die eigentlich als Verbindungen, also als Kanten im Graphen fungieren, wurden hier ebenfalls als Knoten deklariert, da dies die spätere Parameterübergabe an das Messprogramm erleichtert.
In den ersten eckigen Klammern hinter den Geräten werden diese für die Messung relevanten Parameter der entsprechenden Geräte übergeben. Als Parameter wird auf jeden Fall der Dateiname der Initialisierungsdatei des Geräts benötigt. Dies ist eine Textdatei mit der Endung .ini, in der alle wichtigen Informationen über das entsprechende Gerät hinterlegt sind.
Weitere mögliche Parameter sind zum Beispiel der Arbeitsbereich der Geräte, die als condition definiert werden. Weiterhin ist es möglich, beim Erreichen dieser condition bestimmte Aktionen, die als action definiert werden, auszuführen.
In den zweiten eckigen Klammern sind Attribute zur Visualisierung des Graphen zu finden.
Anschließend beginnt die eigentliche Beschreibung des Messaufbaus. Hierbei wird definiert, wie und in welche Richtungen die einzelnen Geräte (Knoten) miteinander verbunden sind. Abbildung 1.1 stellt den im .dot file beschriebenen Aufbau noch einmal grafisch dar. Zur Visualisierung des .dot files wurde das Programm Graphviz benutzt, das sich ebenfalls auf der oben angegebenen Homepage herunterladen lässt.
Bei der Darstellung wurden allerdings aus Gründen der Übersichtlichkeit alle Knoten, die die Verbindungen repräsentieren, also keine wirklichen Knoten sind, ausgeblendet.
Bei jeder Art von Messungen gibt es bestimmte Knoten, die auf alle Fälle im Messaufbau enthalten sein müssen. Diese sind hier grau markiert. Dieser Aufbau findet bei Störemissions- und Störfestigkeitsmessungen Anwendung. Als weiteres Beispiel sei noch ein typischer Aufbau für die Kalibrierung einer Modenverwirbelungskammer angefügt:
digraph {
node [fontsize=12];
graph [fontsize=12];
edge [fontsize=10];
rankdir=LR;
sg [ ini="M:\\umd-config\\largeMSC\\ini\\umd-rs-smr-real.ini" ] [style=filled,color=lightgrey]
fp1 [ini="M:\\umd-config\\largeMSC\\ini\\umd-narda-emc300-1-real.ini"] [style=filled,color=lightgrey]
fp2 [ini="M:\\umd-config\\largeMSC\\ini\\umd-narda-emc300-2-real.ini"] [style=filled,color=lightgrey]
fp3 [ini="M:\\umd-config\\largeMSC\\ini\\umd-narda-emc300-3-real.ini"] [style=filled,color=lightgrey]
fp4 [ini="M:\\umd-config\\largeMSC\\ini\\umd-narda-emc300-4-real.ini"] [style=filled,color=lightgrey]
fp5 [ini="M:\\umd-config\\largeMSC\\ini\\umd-narda-emc300-5-real.ini"] [style=filled,color=lightgrey]
fp6 [ini="M:\\umd-config\\largeMSC\\ini\\umd-narda-emc300-6-real.ini"] [style=filled,color=lightgrey]
fp7 [ini="M:\\umd-config\\largeMSC\\ini\\umd-narda-emc300-7-real.ini"] [style=filled,color=lightgrey]
fp8 [ini="M:\\umd-config\\largeMSC\\ini\\umd-narda-emc300-8-real.ini"] [style=filled,color=lightgrey]
tuner1 [ini="M:\\umd-config\\largeMSC\\ini\\umd-mc-hd-100-real.ini" ch=2] [style=filled,color=lightgrey]
ant1 [ini="M:\\umd-config\\largeMSC\\ini\\umd-sb-VULP9118-C_513.ini" condition="f <= 1e9" ]
ant2 [ini="M:\\umd-config\\largeMSC\\ini\\umd-rs-HF906_04.ini" condition="f > 1e9" ]
refant [style=filled,color=lightgrey]
refant1 [ini="M:\\umd-config\\largeMSC\\ini\\umd-sb-VULP9118-C_514.ini" condition="f <= 1e9" ]
refant2 [ini="M:\\umd-config\\largeMSC\\ini\\umd-rs-HF906_03.ini" condition="f > 1e9" ]
pmref1 [ini="M:\\umd-config\\largeMSC\\ini\\umd-rs-nrvs-real.ini" ch=1] [style=filled,color=lightgrey]
pm2 [ini="M:\\umd-config\\largeMSC\\ini\\umd-rs-nrvd-real.ini" ch=2] [style=filled,color=lightgrey]
pm1 [ini="M:\\umd-config\\largeMSC\\ini\\umd-rs-nrvd-real.ini" ch=1] [style=filled,color=lightgrey]
sw [ini="M:\\umd-config\\largeMSC\\ini\\umd-umd-sb-real.ini" ch=1]
sta [ini="M:\\umd-config\\largeMSC\\ini\\umd-umd-sb-real.ini" ch=2]
amp1 [ini="M:\\umd-config\\largeMSC\\ini\\amplifier1.ini" condition="f <= 1e9" action="import custom\ncustom.my_switch(self.sw, 'f', 1e9)"]
amp2 [ini="M:\\umd-config\\largeMSC\\ini\\amplifier2.ini" condition="f > 1e9" action="import custom\ncustom.my_switch(self.sw, 'f', 1e9)"]
a1 [style=filled,color=lightgrey]
a2 [style=filled,color=lightgrey]
ant [style=filled,color=lightgrey]
cbl_r1_pmr [ini="M:\\umd-config\\largeMSC\\ini\\umd-cable-PM-Ref-Ant_LF-10db.ini" condition="f <= 360e6" action="import custom\ncustom.my_switch(self.sta, 'f', 360e6)"] [color=white, fontcolor=white ]
cbl_r2_pmr [ini="M:\\umd-config\\largeMSC\\ini\\umd-cable-PM-Ref-Ant_LF-0db.ini" condition="360e6 < f <= 1e9"action="import custom\ncustom.my_switch(self.sta, 'f', 360e6)"] [color=white, fontcolor=white ]
cbl_r3_pmr [ini="M:\\umd-config\\largeMSC\\ini\\umd-cable-PM-Ref-Ant_HF-0db.ini" condition="f > 1e9"] [color=white, fontcolor=white ]
cbl_sg_amp1 [ini="M:\\umd-config\\largeMSC\\ini\\umd-cable-SG-AMP_LF.ini" condition="f <= 1e9"] [color=white, fontcolor=white ]
cbl_sg_amp2 [ini="M:\\umd-config\\largeMSC\\ini\\umd-cable-SG-AMP_HF.ini" condition="f > 1e9"] [color=white, fontcolor=white ]
cbl_amp1_ant1 [ini="M:\\umd-config\\largeMSC\\ini\\umd-cable-AMP-ANT_LF.ini" condition="f <= 1e9"] [color=white, fontcolor=white ]
cbl_amp2_ant2 [ini="M:\\umd-config\\largeMSC\\ini\\umd-cable-AMP-ANT_HF.ini" condition="f > 1e9"] [color=white, fontcolor=white ]
cbl_amp1_pm1 [ini="M:\\umd-config\\largeMSC\\ini\\umd-cable-PM-FWD_LF.ini" condition="f <= 1e9"] [color=white, fontcolor=white ]
cbl_amp2_pm1 [ini="M:\\umd-config\\largeMSC\\ini\\umd-cable-PM-FWD_HF.ini" condition="f > 1e9"] [color=white, fontcolor=white ]
cbl_ant1_pm2 [ini="M:\\umd-config\\largeMSC\\ini\\umd-cable-PM-REV_LF.ini" condition="f <= 1e9"] [color=white, fontcolor=white ]
cbl_ant2_pm2 [ini="M:\\umd-config\\largeMSC\\ini\\umd-cable-PM-REV_HF.ini" condition="f > 1e9"] [color=white, fontcolor=white ]
subgraph cluster_amp1 {
label=amp1
a1_a1 -> a2_e1 [dev=amp1 what="S21"]
}
subgraph cluster_amp2 {
label=amp2
a1_a2 -> a2_e2 [dev=amp2 what="S21"]
}
subgraph cluster_pm_in {label=pm_in; pm1_e1; pm1_e2; pm2_e1; pm2_e2; pmref1_e1; pmref1_e2; pmref1_e3}
subgraph cluster_msc {label=MSC; tuner1; ant; ant_a1; ant_a2; ant_e1; ant_e2; ant1; ant2; refant; refant1; refant2; refant_a1; refant_a2; refant_a3}
subgraph cluster_pmoutput {label=output; pm1; pm2 ;pmref1;}
sg -> sg_a1
sg -> sg_a2
sg_a1 -> a1_e1 [dev=cbl_sg_amp1 what="S21"] [label=cbl_sg_amp1]
sg_a2 -> a1_e2 [dev=cbl_sg_amp2 what="S21"] [label=cbl_sg_amp2]
a1_e1 -> a1
a1_e2 -> a1
a1 -> a1_a1
a1 -> a1_a2
a2_e1 -> a2
a2_e2 -> a2
a2 -> a2_a1
a2 -> a2_a2
a2_a1 -> ant_e1 [dev=cbl_amp1_ant1 what="S21"] [label=cbl_amp1_ant1]
a2_a2 -> ant_e2 [dev=cbl_amp2_ant2 what="S21"] [label=cbl_amp2_ant2]
ant_e1 -> ant
ant_e2 -> ant
ant -> ant1
ant1 -> ant
ant -> ant2
ant2 -> ant
ant -> ant_a1
ant -> ant_a2
a2_a1 -> pm1_e1 [dev=cbl_amp1_pm1 what="S21"] [label=cbl_amp1_pm1]
a2_a2 -> pm1_e2 [dev=cbl_amp2_pm1 what="S21"] [label=cbl_amp2_pm1]
pm1_e1 -> pm1
pm1_e2 -> pm1
ant_a1 -> pm2_e1 [dev=cbl_ant1_pm2 what="S21"] [label=cbl_ant1_pm2]
ant_a2 -> pm2_e2 [dev=cbl_ant2_pm2 what="S21"] [label=cbl_ant2_pm2]
pm2_e1 -> pm2
pm2_e2 -> pm2
refant1 -> refant
refant2 -> refant
refant -> refant_a1
refant -> refant_a2
refant -> refant_a3
refant_a3 -> pmref1_e3 [dev=cbl_r3_pmr what="S21"] [label=cbl_r3_pmr]
refant_a2 -> pmref1_e2 [dev=cbl_r2_pmr what="S21"] [label=cbl_r2_pmr]
refant_a1 -> pmref1_e1 [dev=cbl_r1_pmr what="S21"] [label=cbl_r1_pmr]
pmref1_e1 -> pmref1
pmref1_e2 -> pmref1
pmref1_e3 -> pmref1
}
![digraph {
node [fontsize=12];
graph [fontsize=12];
edge [fontsize=10];
rankdir=LR;
sg [ ini="M:\\umd-config\\largeMSC\\ini\\umd-rs-smr-real.ini" ] [style=filled,color=lightgrey]
fp1 [ini="M:\\umd-config\\largeMSC\\ini\\umd-narda-emc300-1-real.ini"] [style=filled,color=lightgrey]
fp2 [ini="M:\\umd-config\\largeMSC\\ini\\umd-narda-emc300-2-real.ini"] [style=filled,color=lightgrey]
fp3 [ini="M:\\umd-config\\largeMSC\\ini\\umd-narda-emc300-3-real.ini"] [style=filled,color=lightgrey]
fp4 [ini="M:\\umd-config\\largeMSC\\ini\\umd-narda-emc300-4-real.ini"] [style=filled,color=lightgrey]
fp5 [ini="M:\\umd-config\\largeMSC\\ini\\umd-narda-emc300-5-real.ini"] [style=filled,color=lightgrey]
fp6 [ini="M:\\umd-config\\largeMSC\\ini\\umd-narda-emc300-6-real.ini"] [style=filled,color=lightgrey]
fp7 [ini="M:\\umd-config\\largeMSC\\ini\\umd-narda-emc300-7-real.ini"] [style=filled,color=lightgrey]
fp8 [ini="M:\\umd-config\\largeMSC\\ini\\umd-narda-emc300-8-real.ini"] [style=filled,color=lightgrey]
tuner1 [ini="M:\\umd-config\\largeMSC\\ini\\umd-mc-hd-100-real.ini" ch=2] [style=filled,color=lightgrey]
ant1 [ini="M:\\umd-config\\largeMSC\\ini\\umd-sb-VULP9118-C_513.ini" condition="f <= 1e9" ]
ant2 [ini="M:\\umd-config\\largeMSC\\ini\\umd-rs-HF906_04.ini" condition="f > 1e9" ]
refant [style=filled,color=lightgrey]
refant1 [ini="M:\\umd-config\\largeMSC\\ini\\umd-sb-VULP9118-C_514.ini" condition="f <= 1e9" ]
refant2 [ini="M:\\umd-config\\largeMSC\\ini\\umd-rs-HF906_03.ini" condition="f > 1e9" ]
pmref1 [ini="M:\\umd-config\\largeMSC\\ini\\umd-rs-nrvs-real.ini" ch=1] [style=filled,color=lightgrey]
pm2 [ini="M:\\umd-config\\largeMSC\\ini\\umd-rs-nrvd-real.ini" ch=2] [style=filled,color=lightgrey]
pm1 [ini="M:\\umd-config\\largeMSC\\ini\\umd-rs-nrvd-real.ini" ch=1] [style=filled,color=lightgrey]
sw [ini="M:\\umd-config\\largeMSC\\ini\\umd-umd-sb-real.ini" ch=1]
sta [ini="M:\\umd-config\\largeMSC\\ini\\umd-umd-sb-real.ini" ch=2]
amp1 [ini="M:\\umd-config\\largeMSC\\ini\\amplifier1.ini" condition="f <= 1e9" action="import custom\ncustom.my_switch(self.sw, 'f', 1e9)"]
amp2 [ini="M:\\umd-config\\largeMSC\\ini\\amplifier2.ini" condition="f > 1e9" action="import custom\ncustom.my_switch(self.sw, 'f', 1e9)"]
a1 [style=filled,color=lightgrey]
a2 [style=filled,color=lightgrey]
ant [style=filled,color=lightgrey]
cbl_r1_pmr [ini="M:\\umd-config\\largeMSC\\ini\\umd-cable-PM-Ref-Ant_LF-10db.ini" condition="f <= 360e6" action="import custom\ncustom.my_switch(self.sta, 'f', 360e6)"] [color=white, fontcolor=white ]
cbl_r2_pmr [ini="M:\\umd-config\\largeMSC\\ini\\umd-cable-PM-Ref-Ant_LF-0db.ini" condition="360e6 < f <= 1e9"action="import custom\ncustom.my_switch(self.sta, 'f', 360e6)"] [color=white, fontcolor=white ]
cbl_r3_pmr [ini="M:\\umd-config\\largeMSC\\ini\\umd-cable-PM-Ref-Ant_HF-0db.ini" condition="f > 1e9"] [color=white, fontcolor=white ]
cbl_sg_amp1 [ini="M:\\umd-config\\largeMSC\\ini\\umd-cable-SG-AMP_LF.ini" condition="f <= 1e9"] [color=white, fontcolor=white ]
cbl_sg_amp2 [ini="M:\\umd-config\\largeMSC\\ini\\umd-cable-SG-AMP_HF.ini" condition="f > 1e9"] [color=white, fontcolor=white ]
cbl_amp1_ant1 [ini="M:\\umd-config\\largeMSC\\ini\\umd-cable-AMP-ANT_LF.ini" condition="f <= 1e9"] [color=white, fontcolor=white ]
cbl_amp2_ant2 [ini="M:\\umd-config\\largeMSC\\ini\\umd-cable-AMP-ANT_HF.ini" condition="f > 1e9"] [color=white, fontcolor=white ]
cbl_amp1_pm1 [ini="M:\\umd-config\\largeMSC\\ini\\umd-cable-PM-FWD_LF.ini" condition="f <= 1e9"] [color=white, fontcolor=white ]
cbl_amp2_pm1 [ini="M:\\umd-config\\largeMSC\\ini\\umd-cable-PM-FWD_HF.ini" condition="f > 1e9"] [color=white, fontcolor=white ]
cbl_ant1_pm2 [ini="M:\\umd-config\\largeMSC\\ini\\umd-cable-PM-REV_LF.ini" condition="f <= 1e9"] [color=white, fontcolor=white ]
cbl_ant2_pm2 [ini="M:\\umd-config\\largeMSC\\ini\\umd-cable-PM-REV_HF.ini" condition="f > 1e9"] [color=white, fontcolor=white ]
subgraph cluster_amp1 {
label=amp1
a1_a1 -> a2_e1 [dev=amp1 what="S21"]
}
subgraph cluster_amp2 {
label=amp2
a1_a2 -> a2_e2 [dev=amp2 what="S21"]
}
subgraph cluster_pm_in {label=pm_in; pm1_e1; pm1_e2; pm2_e1; pm2_e2; pmref1_e1; pmref1_e2; pmref1_e3}
subgraph cluster_msc {label=MSC; tuner1; ant; ant_a1; ant_a2; ant_e1; ant_e2; ant1; ant2; refant; refant1; refant2; refant_a1; refant_a2; refant_a3}
subgraph cluster_pmoutput {label=output; pm1; pm2 ;pmref1;}
sg -> sg_a1
sg -> sg_a2
sg_a1 -> a1_e1 [dev=cbl_sg_amp1 what="S21"] [label=cbl_sg_amp1]
sg_a2 -> a1_e2 [dev=cbl_sg_amp2 what="S21"] [label=cbl_sg_amp2]
a1_e1 -> a1
a1_e2 -> a1
a1 -> a1_a1
a1 -> a1_a2
a2_e1 -> a2
a2_e2 -> a2
a2 -> a2_a1
a2 -> a2_a2
a2_a1 -> ant_e1 [dev=cbl_amp1_ant1 what="S21"] [label=cbl_amp1_ant1]
a2_a2 -> ant_e2 [dev=cbl_amp2_ant2 what="S21"] [label=cbl_amp2_ant2]
ant_e1 -> ant
ant_e2 -> ant
ant -> ant1
ant1 -> ant
ant -> ant2
ant2 -> ant
ant -> ant_a1
ant -> ant_a2
a2_a1 -> pm1_e1 [dev=cbl_amp1_pm1 what="S21"] [label=cbl_amp1_pm1]
a2_a2 -> pm1_e2 [dev=cbl_amp2_pm1 what="S21"] [label=cbl_amp2_pm1]
pm1_e1 -> pm1
pm1_e2 -> pm1
ant_a1 -> pm2_e1 [dev=cbl_ant1_pm2 what="S21"] [label=cbl_ant1_pm2]
ant_a2 -> pm2_e2 [dev=cbl_ant2_pm2 what="S21"] [label=cbl_ant2_pm2]
pm2_e1 -> pm2
pm2_e2 -> pm2
refant1 -> refant
refant2 -> refant
refant -> refant_a1
refant -> refant_a2
refant -> refant_a3
refant_a3 -> pmref1_e3 [dev=cbl_r3_pmr what="S21"] [label=cbl_r3_pmr]
refant_a2 -> pmref1_e2 [dev=cbl_r2_pmr what="S21"] [label=cbl_r2_pmr]
refant_a1 -> pmref1_e1 [dev=cbl_r1_pmr what="S21"] [label=cbl_r1_pmr]
pmref1_e1 -> pmref1
pmref1_e2 -> pmref1
pmref1_e3 -> pmref1
}](../_images/graphviz-d19139bd4e512fe73c2de173f7f356a932bc89ab.png)
In Abbildung Kalibrieraufbau ist der entsprechende Aufbau zu sehen.
Hier sind zusätzlich noch die für die Kalibrierung notwendigen 8 Feldsonden zu sehen. Weiterhin werden in dieser MVK auf Grund ihres Arbeitsbereiches je nach Frequenzbereich unterschiedliche Antennen und Verstärker benutzt, zwischen denen entsprechend im Programmablauf hin- und hergeschaltet wird.
Auch hier markieren die grauen Knoten wieder die bei einer Kalibrierung unbedingt erforderlichen Knoten. Hier ist bei den Verstärkern und Kabeln zu sehen, dass beim Erreichen von 360 MHz bzw. 1 GHz, dies ist als condition festgelegt, eine action auszuführen ist. Dies ist in diesem Fall das Umschalten des Signalpfades. Zum einen wird bei Frequenzen unterhalb von 360 MHz ein Abschwächer im Signalpfad benutzt, der dann auf einem anderen Signalpfad umgangen wird. Zum anderen werden bei Messungen oberhalb von 1 GHz andere Antennen und Verstärker benutzt, so dass auch beim Erreichen dieser Frequenz der Signalpfad geändert werden muss. Das Umschalten der Pfade wird programmgesteuert über die Umschalter sta und sw realisiert.
Die Initialisierungsdatei¶
Wie bereits erwähnt, ist die .ini Datei die Datei, in der alle Startattribute für die einzelnen Geräte festgelegt sind. Wenn dem aufrufenden Messprogramm keine anderen Attribute übergeben werden, werden die Geräte mit den in der .ini-Datei festgelegten Parametern initialisiert. Im nächsten Listing ist als Beispiel die Initialisierungsdatei für den Signalgenerator SMT06 der Firma R&S zu sehen. Anhand dieser noch recht übersichtlichen Datei soll kurz auf deren Aufbau eingegangen werden:
[description]
DESCRIPTION = "Rohde&Schwarz SMT20 Signal Generator"
TYPE = "SIGNALGENERATOR"
VENDOR ="Rohde&Schwarz"
SERIALNR = ""
DEVICEID = ""
DRIVER = "M:\\dlls\\umd-rs-smt.dll"
NR_OF_CHANNELS = "1"
[INIT_VALUE]
FSTART = "5e3"
FSTOP = "6e9"
FSTEP = "1.0"
GPIB = "28"
VIRTUAL = "1"
[CHANNEL_1]
NAME = "RF Out"
LEVEL = "-100"
UNIT = "dBm"
LEVELOFFSET = "0.0"
LEVELLIMIT = "0.0"
OUTPUTSTATE = "0"
LFOUTPUTSTATE = "0"
ATTMODE = "0"
OPERATINGMODE = "0"
Die .ini Datei enthält eine Reihe von für diese Gerätefamilie nötigen Keys mit entsprechenden Werten.
Die ersten Blöcke sind für alle Geräte gleich. Im ersten, allgemeinen, Block wird der Name, Typ und Hersteller festgehalten. Falls bekannt, kann in diesem Block auch die Seriennummer und ID des Gerätes festgehalten werden. Letzlich wird der Speicherort des Treibers für das Gerät und die Anzahl der möglichen Kanäle des Gerätes übergeben. Im zweiten Block werden Start- und Stopfrequenz, die Schrittweite, die GPIB-Adresse und die Betriebsart übergeben. Zum Schluss folgt für jeden nutzbaren Kanal des Gerätes ein Block, in dem die für dieses Gerät typischen Einstellmöglichkeiten mit Startwerten belegt werden, damit beim Initialisieren der Geräte keine undefinierten Zustände entstehen oder Einstellungen von alten Messungen beibehalten werden, die evtl. den aktuellen Messaufbau zum Beispiel durch zu hohe Feldstärken gefährden.
Kalibriermessungen¶
Der Ablauf einer typischen Kalibriermessung soll am Beispiel der Kalibrierung einer leeren Modenverwirbelungskammer erläutert werden. Wie bereits angesprochen, ist es günstiger, für jede Messung einen gesonderten Ordner zu benutzen, um in diesem alle Daten zu speichern. In dieses Ordner gehören jeweils die Konfigurationsdatei, das aufrufende Messprogramm und evtl. die entsprechende .dot-Datei. In der fogenden Abbildung ist ein Beispiel für den Inhalt eines Messordners zu sehen. Zusätzlich befindet sich im Ordner noch eine zweite Konfigurationsdatei für die Auswertung und zwei Batchdateien, mit denen die Messung oder Auswertung auch gestartet werden kann.
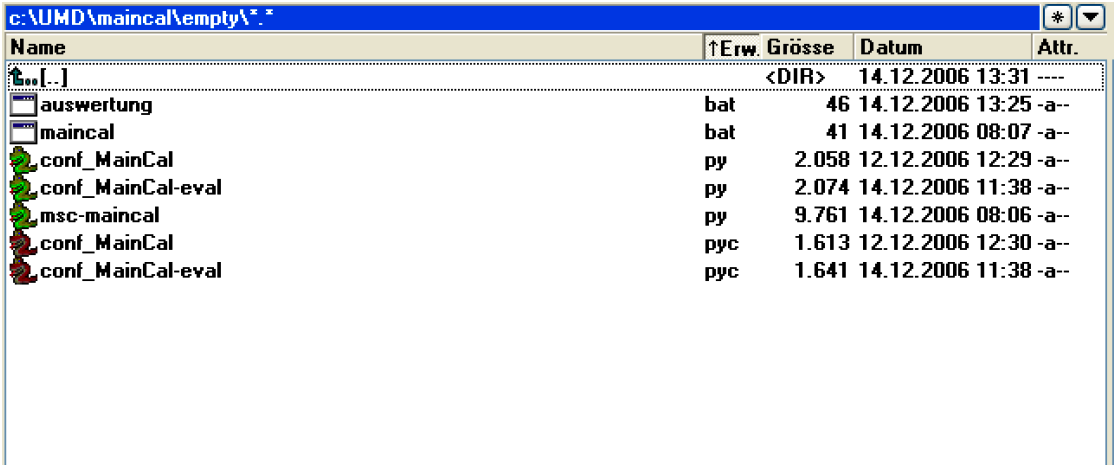
Messordnerinhalt vor Beginn der Messungen¶
Vorbereitungen¶
Die dot-Datei¶
Die .dot Datei wurde in diesem Fall im globalen Verzeichnis der .dot Dateien hinterlegt.
Sie ist im folgendem Listing dargestellt:
digraph {node [fontsize=12];
graph [fontsize=12];
edge [fontsize=10];
rankdir=LR;
sg [ini="C:\\UMD\\umd-config\\ini\\rs-smg.ini"] [style=filled, color=lightgrey]
fp1 [ini="C:\\UMD\\umd-config\\ini\\ar-fm7004-1.ini"ch=1] [style=filled,color=lightgrey]
fp2 [ini="C:\\UMD\\umd-config\\ini\\ar-fm7004-1.ini"ch=2] [style=filled,color=lightgrey]
fp3 [ini="C:\\UMD\\umd-config\\ini\\ar-fm7004-1.ini"ch=3] [style=filled,color=lightgrey]
fp4 [ini="C:\\UMD\\umd-config\\ini\\ar-fm7004-1.ini"ch=4] [style=filled,color=lightgrey]
fp5 [ini="C:\\UMD\\umd-config\\ini\\ar-fm7004-2.ini"ch=1] [style=filled,color=lightgrey]
fp6 [ini="C:\\UMD\\umd-config\\ini\\ar-fm7004-2.ini"ch=2] [style=filled,color=lightgrey]
fp7 [ini="C:\\UMD\\umd-config\\ini\\ar-fm7004-2.ini"ch=3] [style=filled,color=lightgrey]
fp8 [ini="C:\\UMD\\umd-config\\ini\\ar-fm7004-2.ini"ch=4] [style=filled,color=lightgrey]
amp [ini="C:\\UMD\\umd-config\\ini\\AR80W1000M1.ini"]
tuner [ini="C:\\UMD\\umd-config\\ini\\tuner.ini"] [style=filled,color=lightgrey]
ant [ini="C:\\UMD\\umd-config\\ini\\AT4000A.ini" condition="200e6<f<=1e9"] [style=filled,color=lightgrey]
refant [ini="C:\\UMD\\umd-config\\ini\\HL223.ini" condition="200e6<f<=1.3e9"] [style=filled,color=lightgrey]
pmref [ini="C:\\UMD\\umd-config\\ini\\NRV-Rx.ini"ch=1] [style=filled,color=lightgrey]
pm1 [ini="C:\\UMD\\umd-config\\ini\\NRVPA.ini"ch=1] [style=filled,color=lightgrey]
pm2 [ini="C:\\UMD\\umd-config\\ini\\NRVPA.ini"ch=2] [style=filled,color=lightgrey]
a1 [style=filled,color=lightgrey]
a2 [style=filled,color=lightgrey]
conn_sg_amp [ini="C:\\UMD\\umd-config\\ini\\CONNSMG--PA4.ini" condition="80e6<=f<=1e9"] [color=white,fontcolor=white]
conn_amp_msc [ini="C:\\UMD\\umd-config\\ini\\CONN-PA4-MSC.ini" condition="80e6<=f<=1e9"] [color=white,fontcolor=white]
conn_msc_ant [ini="C:\\UMD\\umd-config\\ini\\CBL-716G3.ini" condition="80e6<=f<=1e9"] [color=white,fontcolor=white]
conn_amp_dc_fwd [ini="C:\\UMD\\umd-config\\ini\\CONN-Bonn_BDC0810_Fwd_7-16.ini" condition="80e6<=f<=1e9"] [color=white,fontcolor=white]
conn_msc_dc_rev [ini="C:\\UMD\\umd-config\\ini\\CONN-Bonn_BDC0810_Rev_7-16.ini" condition="80e6<=f<=1e9"] [color=white,fontcolor=white]
conn_dc_fwd_pm1 [ini="C:\\UMD\\umd-config\\ini\\CONN-PA4-NRV_A.ini" condition="80e6<=f<=1e9"] [color=white,fontcolor=white]
conn_dc_rev_pm2 [ini="C:\\UMD\\umd-config\\ini\\CONN-PA4-NRV_B.ini" condition="80e6<=f<=1e9"] [color=white,fontcolor=white]
conn_refant_att [ini="C:\\UMD\\umd-config\\ini\\CONN-HL223-NRV_RX_Antenna.ini" condition="80e6<=f<=1e9"] [color=white, fontcolor=white]
conn_att_pmref [ini="C:\\UMD\\umd-config\\ini\\CONN-Weinschel-46-20-34.ini" condition="f<=18e9"] [color=white,fontcolor=white]
cbl_rg214_5m_2003 [ini="C:\\UMD\\umd-config\\ini\\CBL-RG214-5m-2003.ini" condition="80e6<=f<=1e9"] [color=white, fontcolor=white]
subgraph cluster_amp {
label=amp
amp_in -> amp [dev=amp what="S21"]
amp -> amp_out}
subgraph cluster_pm_in {
label=pm_in;
pm1_e1;
pm2_e1;
pmref_e1}
subgraph cluster_feedthrough {
label=feedthrough;
msc_in;
msc_out}
subgraph cluster_msc {
label=MSC;
tuner;
fp1;
fp2;
fp3;
fp4;
fp5;
fp6;
fp7;
fp8;
ant;
refant;
refant_a1}
subgraph cluster_dc {
label=dc;
dc_fwd;
dc_rev}
subgraph cluster_pmoutput {
label=pmoutput;
pm1;
pm2;
pmref}
subgraph cluster_e_fieldoutput {
label=e_fieldoutput;
field_mon1;
field_mon2}
sg -> a1 [dev=conn_sg_amp what="S21"] [label=conn_sg_amp]
a1 -> amp_in
amp_out -> a2
a2 -> a21 [dev=cbl_rg214_5m_2003 what="S21"] [label=cbl_rg214_5m_2003]
a21 -> msc_in [dev=conn_amp_msc what="S21"] [label=conn_amp_msc]
msc_in -> ant [dev=conn_msc_ant what="S21"] [label=cbl_msc_ant]
ant -> msc_out [dev=conn_msc_ant what="S21"] [label=cbl_msc_ant]
a2 -> dc_fwd [dev=conn_amp_dc_fwd what="S21"] [label=conn_amp_dc_fwd]
dc_fwd -> pm1_e1 [dev=conn_dc_fwd_pm1 what="S21"] [label=conn_dc_fwd_pm1]
pm1_e1 -> pm1
msc_out -> dc_rev [dev=conn_msc_dc_rev what="S21"] [label=conn_msc_dc_rev]
dc_rev -> pm2_e1 [dev=conn_dc_rev_pm2 what="S21"] [label=conn_dc_rev_pm2]
pm2_e1 -> pm2
refant -> refant_a1
refant_a1 -> att [dev=conn_refant_att what="S21"] [label=conn_refant_att]
att -> pmref_e1 [dev=conn_att_pmref what="S21"] [label=conn_att_pmref]
pmref_e1 -> pmref
fp1 -> field_mon1
fp2 -> field_mon1
fp3 -> field_mon1
fp4 -> field_mon1
fp5 -> field_mon2
fp6 -> field_mon2
fp7 -> field_mon2
fp8 -> field_mon2}
Der entsprechende Messgraph sieht wie folgt aus:
![digraph {node [fontsize=12];
graph [fontsize=12];
edge [fontsize=10];
rankdir=LR;
sg [ini="C:\\UMD\\umd-config\\ini\\rs-smg.ini"] [style=filled, color=lightgrey]
fp1 [ini="C:\\UMD\\umd-config\\ini\\ar-fm7004-1.ini"ch=1] [style=filled,color=lightgrey]
fp2 [ini="C:\\UMD\\umd-config\\ini\\ar-fm7004-1.ini"ch=2] [style=filled,color=lightgrey]
fp3 [ini="C:\\UMD\\umd-config\\ini\\ar-fm7004-1.ini"ch=3] [style=filled,color=lightgrey]
fp4 [ini="C:\\UMD\\umd-config\\ini\\ar-fm7004-1.ini"ch=4] [style=filled,color=lightgrey]
fp5 [ini="C:\\UMD\\umd-config\\ini\\ar-fm7004-2.ini"ch=1] [style=filled,color=lightgrey]
fp6 [ini="C:\\UMD\\umd-config\\ini\\ar-fm7004-2.ini"ch=2] [style=filled,color=lightgrey]
fp7 [ini="C:\\UMD\\umd-config\\ini\\ar-fm7004-2.ini"ch=3] [style=filled,color=lightgrey]
fp8 [ini="C:\\UMD\\umd-config\\ini\\ar-fm7004-2.ini"ch=4] [style=filled,color=lightgrey]
amp [ini="C:\\UMD\\umd-config\\ini\\AR80W1000M1.ini"]
tuner [ini="C:\\UMD\\umd-config\\ini\\tuner.ini"] [style=filled,color=lightgrey]
ant [ini="C:\\UMD\\umd-config\\ini\\AT4000A.ini" condition="200e6<f<=1e9"] [style=filled,color=lightgrey]
refant [ini="C:\\UMD\\umd-config\\ini\\HL223.ini" condition="200e6<f<=1.3e9"] [style=filled,color=lightgrey]
pmref [ini="C:\\UMD\\umd-config\\ini\\NRV-Rx.ini"ch=1] [style=filled,color=lightgrey]
pm1 [ini="C:\\UMD\\umd-config\\ini\\NRVPA.ini"ch=1] [style=filled,color=lightgrey]
pm2 [ini="C:\\UMD\\umd-config\\ini\\NRVPA.ini"ch=2] [style=filled,color=lightgrey]
a1 [style=filled,color=lightgrey]
a2 [style=filled,color=lightgrey]
conn_sg_amp [ini="C:\\UMD\\umd-config\\ini\\CONNSMG--PA4.ini" condition="80e6<=f<=1e9"] [color=white,fontcolor=white]
conn_amp_msc [ini="C:\\UMD\\umd-config\\ini\\CONN-PA4-MSC.ini" condition="80e6<=f<=1e9"] [color=white,fontcolor=white]
conn_msc_ant [ini="C:\\UMD\\umd-config\\ini\\CBL-716G3.ini" condition="80e6<=f<=1e9"] [color=white,fontcolor=white]
conn_amp_dc_fwd [ini="C:\\UMD\\umd-config\\ini\\CONN-Bonn_BDC0810_Fwd_7-16.ini" condition="80e6<=f<=1e9"] [color=white,fontcolor=white]
conn_msc_dc_rev [ini="C:\\UMD\\umd-config\\ini\\CONN-Bonn_BDC0810_Rev_7-16.ini" condition="80e6<=f<=1e9"] [color=white,fontcolor=white]
conn_dc_fwd_pm1 [ini="C:\\UMD\\umd-config\\ini\\CONN-PA4-NRV_A.ini" condition="80e6<=f<=1e9"] [color=white,fontcolor=white]
conn_dc_rev_pm2 [ini="C:\\UMD\\umd-config\\ini\\CONN-PA4-NRV_B.ini" condition="80e6<=f<=1e9"] [color=white,fontcolor=white]
conn_refant_att [ini="C:\\UMD\\umd-config\\ini\\CONN-HL223-NRV_RX_Antenna.ini" condition="80e6<=f<=1e9"] [color=white, fontcolor=white]
conn_att_pmref [ini="C:\\UMD\\umd-config\\ini\\CONN-Weinschel-46-20-34.ini" condition="f<=18e9"] [color=white,fontcolor=white]
cbl_rg214_5m_2003 [ini="C:\\UMD\\umd-config\\ini\\CBL-RG214-5m-2003.ini" condition="80e6<=f<=1e9"] [color=white, fontcolor=white]
subgraph cluster_amp {
label=amp
amp_in -> amp [dev=amp what="S21"]
amp -> amp_out}
subgraph cluster_pm_in {
label=pm_in;
pm1_e1;
pm2_e1;
pmref_e1}
subgraph cluster_feedthrough {
label=feedthrough;
msc_in;
msc_out}
subgraph cluster_msc {
label=MSC;
tuner;
fp1;
fp2;
fp3;
fp4;
fp5;
fp6;
fp7;
fp8;
ant;
refant;
refant_a1}
subgraph cluster_dc {
label=dc;
dc_fwd;
dc_rev}
subgraph cluster_pmoutput {
label=pmoutput;
pm1;
pm2;
pmref}
subgraph cluster_e_fieldoutput {
label=e_fieldoutput;
field_mon1;
field_mon2}
sg -> a1 [dev=conn_sg_amp what="S21"] [label=conn_sg_amp]
a1 -> amp_in
amp_out -> a2
a2 -> a21 [dev=cbl_rg214_5m_2003 what="S21"] [label=cbl_rg214_5m_2003]
a21 -> msc_in [dev=conn_amp_msc what="S21"] [label=conn_amp_msc]
msc_in -> ant [dev=conn_msc_ant what="S21"] [label=cbl_msc_ant]
ant -> msc_out [dev=conn_msc_ant what="S21"] [label=cbl_msc_ant]
a2 -> dc_fwd [dev=conn_amp_dc_fwd what="S21"] [label=conn_amp_dc_fwd]
dc_fwd -> pm1_e1 [dev=conn_dc_fwd_pm1 what="S21"] [label=conn_dc_fwd_pm1]
pm1_e1 -> pm1
msc_out -> dc_rev [dev=conn_msc_dc_rev what="S21"] [label=conn_msc_dc_rev]
dc_rev -> pm2_e1 [dev=conn_dc_rev_pm2 what="S21"] [label=conn_dc_rev_pm2]
pm2_e1 -> pm2
refant -> refant_a1
refant_a1 -> att [dev=conn_refant_att what="S21"] [label=conn_refant_att]
att -> pmref_e1 [dev=conn_att_pmref what="S21"] [label=conn_att_pmref]
pmref_e1 -> pmref
fp1 -> field_mon1
fp2 -> field_mon1
fp3 -> field_mon1
fp4 -> field_mon1
fp5 -> field_mon2
fp6 -> field_mon2
fp7 -> field_mon2
fp8 -> field_mon2}](../_images/graphviz-c440b0733d1b6a517a8aa37ee743ce51deff0ed3.png)
Konfigurationsdatei¶
Die bei der Kalibrierung verwendete Konfigurationsdatei ist im folgenden Listing zu finden:
import os
import umdutil
umdpath=umdutil.getUMDPath()
dotfile = umdutil.GetFileFromPath('MSC-maincal.dot',umdpath)
#print dotfile
cdict = {"autosave_filename": 'msc-autosave.p',
"pickle_output_filename": 'msc-maincal.p',
"pickle_input_filename": None,
"rawdata_output_filename": 'out_raw_maincal-%s.dat',
"processeddata_output_filename": 'out_processed_maincal-%s.dat',
"after_measurement_pickle_file": 'out_after_maincal_%s.p',
"log_filename": 'msc.log',
"logger": ['stdlogger'],
"minimal_autosave_interval": 1800,
"descriptions": ['empty'],
"measure_parameters": [{'dotfile': dotfile,
'delay': 0.5,
'FStart': 200e6,
'FStop': 1e9,
'SGLevel': -20,
'leveling': None,
'ftab': [3,6,10,100,1000],
'nftab': [20,15,10,20,20],
'ntuntab': [[50,18,12,12,12]],
'tofftab': [[7,14,28,28,28]],
'nprbpostab': [8,8,8,8,8],
'nrefantpostab': [8,8,8,8,8],
'names': {'sg': 'sg',
'a1': 'a1',
'a2': 'a2',
'ant': 'ant',
'pmfwd': 'pm1',
'pmbwd': 'pm2',
'fp': ['fp1','fp2','fp3','fp4','fp5','fp6','fp7','fp8'],
'tuner': ['tuner'],
'refant': ['refant'],
'pmref': ['pmref']
}
}]
}
Zunächst werden einige zusätzliche notwendige Module geladen.
Das Modul os ist ein von Python zur Verfügung gestelltes Modul
zur Zusammenarbeit mit dem Betriebssystem. Das Modul umdutil enthält
nützliche Tools für die Messroutinen und Auswertung und wird vom
Entwicklerteam der Universität Magdeburg bereitgestellt und betreut,
daher auch der Name uni md utillities.
In Zeile 4 wird eine Umgebungsvariable abgefragt und der Variable umdpath zugeordnet. Diese Umgebungvarable muss unter dem Namen UMDPATH auf dem benutzten Arbeitsplatzrechner eingerichtet werden und enthält alle Pfade, in denen das Messprogramm nach benötigten Dateien suchern soll, wenn sich selbige nicht im Messordner befinden oder mit Verweis auf den vollständigen Pfad übergeben werden. Eine dieser Dateien wäre zum Beispiel die .dot Datei, die in dem Sammelordner für .dot Dateien hinterlegt ist, dessen Pfad ebenfalls in der Umgebungsvariable UMDPATH enthalten sein muss.
In Zeile 5 sucht dann der Befehl
umdutil.GetFileFromPath() aus dem Modul umdutil nach dem übergebenen
Namen der .dot Datei (MSC-maincal.dot). Diese Suche erfolgt erst im
eigenen Messordner. Falls die Datei dort nicht gefunden wird, werden
die Pfade, die in UMDPATH abgelegt sind, der Reihenfolge nach
durchsucht, daher wird ebenfalls die Variable umdpath beim
Befehlsaufruf übergeben. Alternativ kann der Name der benötigten
.dot Datei auch direkt der Variablen umdpath zugewiesen werden. Wenn
sie in einem anderen Ordner als dem Messordner liegt, ist dazu
natürlich die Angabe mit Pfad nötig.
In Zeile 7 erfolgt Befehl, zur
Kontrolle noch einmal auszugeben, welche dot Datei nun für die Messung
verwendet wird. Anschließend wird noch ein Konfigurationsblock cdict
erzeugt, dass alle festgelegten Parameter, Dateien und Namen enthält
und dann vom aufrufenden Messprogramm ausgewertet bzw. der Instanz der
MSC Klasse übergeben wird. Hierbei befinden sich jeweils an erster
Stelle die Namen, die von der Software intern benutzt werden, gefolgt
von den Bezeichnungen, die der Anwender wünscht oder bereits verwendet
hat.
Die Punkte bedeuten im Einzelnen:
autosave_filename ist der Name der Autosave-Datei.
pickle_output_filename ist der Name der auszugebenen pickle-Datei.
pickle_input_filename ist der Name einer schon vorhandenen pickle-Datei, die vor Beginn der Messungen eingelesen werden soll.
rawdata_output_filename ist der Name der Ausgabedatei für die unbehandelten Messdaten.
processeddata_output_filename ist Name der Ausgabedatei für die Ergebnisdaten.
after_measurement_pickle_file bezeichnet den Namen des pickle-files, das nach Abschluss der Kalibriermessung erstellt wird.
log_logfilename ist der Name der Datei, die alle Vorgänge während der Messung mitprotokolliert.
logger legt die Routine zum Führen der Protokolldatei fest.
minimal_autosave_interval ist die minimale Zeitspanne für die Autosaves in Sekunden, im Beispiel also eine halbe Stunde.
description ist die Bezeichnung für die aktuelle Messung.
Anschließend erfolgt die Übergabe der Messparameter für die Instanz der MSC-Klasse. Dabei werden folgende Werte übergeben:
dotfile ist der Name der, den Aufbau charakterisierenden, dot-Datei, welche weiter oben bereits definiert wurde.
delay ist eine zusätzliche Verzögerung in Sekunden nach der Positionierung des Rührers, bevor die Messung begonnen wird, um dem Rührer die Gelgenheit zu geben, auszuschwingen o.ä..
FStart ist die Startfrequenz, ab der gemessen wird in Hz.
FStop ist die höchste Frequenz in Hz, bei der gemessen wird.
SGLevel Ist der Ausgangslevel des Signalgenerators in dBm, bei dem die Messung erfolgt. Dieser Pegel wird in der Regel noch durch den im Messaufbau befindlichen Verstärker erhöht.
leveling
ftab ist eine Liste von Frequenzgrenzen, innerhalb derer eine bestimmte Anzahl von Frequenzen, Tunerpositionen, Feldsondenpositionen und Referenzantennenpositionen zu untersuchen sind. Die Grenzen sind samt der zu untersuchenden Positionen in der Norm nachzulesen. Es wird in den Bereich bis zur dreifachen Startfrequenz 3fs , den Bereich von 3fs bis 6fs , von 6fs bis 10 fs und darüber in Dekaden unterschieden, in denen jeweils eine bestimmte Anzahl von Frequenzen, Tuner- und Messpositionen zu untersuchen sind.- nftab ist die Liste mit der Anzahl der zu untersuchenden Frequenzen pro Abschnitt.
ntuntab ist die Liste mit der Anzahl der zu untersuchenden Tunerpositionen pro Abschnitt.
tofftab ist die Liste mit der zu benutzenden entsprechenden Tunerschrittweite pro Abschnitt, hier wird in Abstand von 7° und Vielfachen davon gemessen, um die Anzahl der gesamt anzufahrenden Tunerpositionen gering zu halten und so die Messgeschwindigkeit zu optimieren.
nprbpostab ist die Liste mit der Anzahl der zu messenden Feldstärken pro Abschnitt.
nrefantpostab ist die Liste mit der Anzahl der zu messenden Referenzleistungen pro Abschnitt.
names sind die Bezeichnungen der Elemente der Messkette. Hierbei sind die Namen, die der Anwender für die Elemente in der dot-Datei benutzt, zu übergeben.
Messung¶
Zum Start der Messung muss man sich im Konsolenmodus befinden. Dazu ruft man über die Eingabeaufforderung auf und gibt das Kommando cmd Enter ein. Anschließend wechselt man in der sich öffnenden Konsole in das Verzeichnis des aktuellen Messordners. Dort ruft man zum Start in der Umgebung python das Messprogramm, gefolgt vom Konfigurationsfile, auf. Dies ist in der fiolgenden Abbildung zu sehen. Alternativ kann die Messung auch durch Doppelklick auf die Batchdatei maincal.bat gestartet werden.
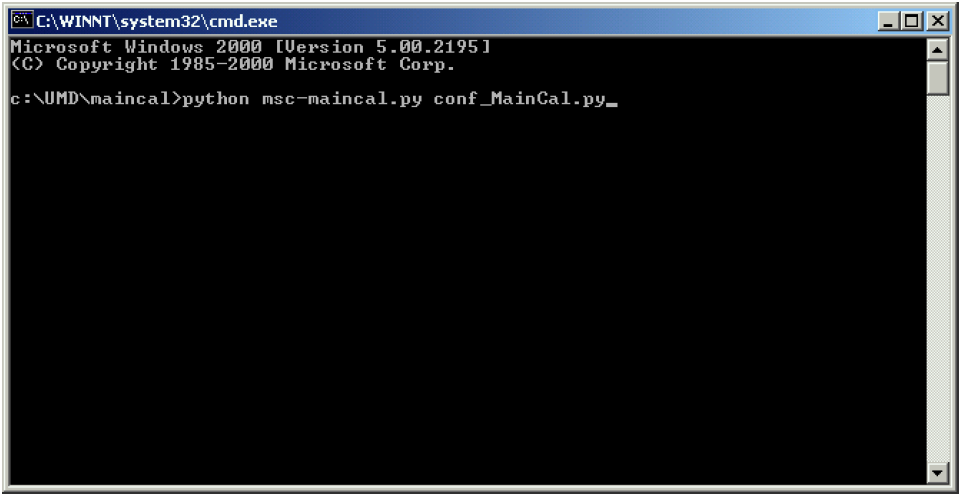
Aufruf des Messprogramms¶
Während der Messung wird also durch das aufrufende Messprogramm eine Instanz der Klasse MSC
erzeugt, der dann die Messparameter übergeben werden und die dann die Messung entsprechend
ausführt und auswertet.
Das Messprogramm msc-maincal.py¶
Das aufrufende Messprogramm ist im folgenden Listing zu sehen:
import os
import sys
import gzip
import pprint
try:
import cPickle as pickle
except ImportError:
import pickle
import MSC
import umddevice
import umdutil
umdpath=umdutil.getUMDPath()
dotfile = umdutil.GetFileFromPath('MSC-maincal.dot',umdpath)
cdict = {"autosave_filename": 'msc-autosave.p',
"pickle_output_filename": 'msc-maincal.p',
"pickle_input_filename": None,
"rawdata_output_filename": 'out_raw_maincal-%s.dat',
"processeddata_output_filename": 'out_processed_maincal-%s.dat',
"after_measurement_pickle_file": 'out_after_maincal_%s.p',
"log_filename": 'msc.log',
"logger": ['stdlogger'],
"minimal_autosave_interval": 1800,
"descriptions": ['empty'],
"measure_parameters": [{'dotfile': dotfile,
'delay': 0.5,
'FStart': 200e6,
'FStop': 1e9,
'SGLevel': -20,
'leveling': None,
'ftab': [3,6,10,100,1000],
'nftab': [20,15,10,20,20],
'ntuntab': [[50,18,12,12,12]],
'tofftab': [[7,14,28,28,28]],
'nprbpostab': [8,8,8,8,8],
'nrefantpostab': [8,8,8,8,8],
'names': {'sg': 'sg',
'a1': 'a1',
'a2': 'a2',
'ant': 'ant',
'pmfwd': 'pm1',
'pmbwd': 'pm2',
'fp': ['fp1','fp2','fp3','fp4','fp5','fp6','fp7','fp8'],
'tuner': ['tuner'],
'refant': ['refant'],
'pmref': ['pmref']
}
}]
}
def myopen (name, mode):
if name[-3:] == '.gz':
return gzip.open(name, mode)
else:
return file(name, mode)
def update_conf (cdict):
try:
import config
cdict.update(config.cdict)
print "Configuration updated from 'config.py'."
except ImportError:
pass
if len(sys.argv)>1:
for name in sys.argv[1:]:
try:
_mod = __import__(name[:name.rindex('.')])
cdict.update(getattr(_mod, 'cdict'))
print "Configuration updated from '%s'."%name
except:
try:
dct=eval(name)
if type(dct) == type({}):
cdict.update(dct)
print "Configuration updated from '%s'."%str(dct)
except:
pass
def load_from_autosave(fname):
msc=None
cmd=None
if os.path.isfile(fname):
try:
pfile = myopen(fname, "rb")
msc=pickle.load(pfile)
cmd=msc.ascmd
if msc:
msg = "Auto save file %s found.\ncmd: %s\n\nResume: Resume Measurement\nNew: Start new."%(fname, cmd)
but = ["Resume", "New"]
answer = msc.messenger(msg, but)
#answer=0
if answer == but.index('Resume'):
startnew = False
else:
del msc
del cmd
msc=None
cmd=None
except IOError, m:
# this is no problem
msc.messenger("IOError during check for autosave-file: %s\nContinue with normal operation..."%m, [])
except (UnpicklingError, AttributeError, EOFError, ImportError, IndexError), m:
# unpickle was not succesful, but we will continue anyway
# user can decide later if he want to finish.
msc.messenger("Error during unpickle of autosave-file: %s\nContinue with normal operation..."%m, [])
except:
# raise all unhadled exceptions
raise
return msc,cmd
def make_logger_list(msc, clogger):
logger = []
for _l in clogger:
_lst = _l.split('.') # _lst can be e.g. [stdlogger] or [custom, Filetablogger]
_mod=None
if len(_lst)==1:
# no module given
_mod = msc
elif len(_lst)==2:
try:
_mod = __import__(_lst[0])
except ImportError, m:
_mod = None
msc.messenger("ImportError: %s"%m, [])
if _mod:
try:
logger.append(getattr(msc,_l))
except AttributeError, m:
msc.messenger("Logger not found: %s"%m, [])
if not len(logger): #empty
logger=[msc.stdlogger] # fall back to stdlogger
return logger[:]
if __name__ == '__main__':
update_conf(cdict)
print "Configuration values:"
print
pprint.pprint (cdict)
msc,cmd=load_from_autosave(cdict['autosave_filename'])
if not msc:
if cdict['pickle_input_filename']:
pfile = myopen(cdict['pickle_input_filename'], "rb")
print "Loading input pickle file '%s'..."%cdict['pickle_input_filename']
msc=pickle.load(pfile)
pfile.close()
print "...done"
else:
msc=MSC.MSC()
msc.setLogFile(cdict['log_filename'])
logger = make_logger_list(msc,cdict['logger'])
msc.setLogger(logger)
msc.setAutoSave(cdict['autosave_filename'])
msc.SetAutoSaveInterval(cdict['minimal_autosave_interval'])
descriptions = cdict['descriptions'][:]
for _i,_des in enumerate(cdict['descriptions']):
try:
mp = cdict['measure_parameters'][_i]
except IndexError:
mp = cdict['measure_parameters'][0]
mp['description']=_des
domeas=True
doeval=True
if msc.rawData_MainCal.has_key(_des):
domeas=False
doeval=False
msg = """"
Measurement with description '%s' allready found in MSC instance.\n
How do you want to proceed?\n\n
Continue: Continue with Measurement.\n
Skip: Skip Measurement but do Evaluation.\n
Break: Skip Measurement and Evaluation.\n
Exit: Exit Application
"""%(_des)
but = ["Continue", "Skip", "Break", "Exit"]
answer = msc.messenger(msg, but)
#answer=0
if answer == but.index('Break'):
continue
elif answer == but.index('Exit'):
sys.exit()
elif answer == but.index('Continue'):
domeas=True
doeval=True
elif answer==but.index('Skip'):
domeas=False
doeval=True
else:
# be save and do nothing
continue
if domeas:
msc.Measure_MainCal(**mp)
pickle.dump(msc, file(cdict["after_measurement_pickle_file"]%_des, 'wb'),2)
if doeval:
msc.OutputRawData_MainCal(fname=cdict["rawdata_output_filename"]%_des)
msc.Evaluate_MainCal(description=_des)
for _passedcal in cdict['descriptions'][:cdict['descriptions'].index(_des)]:
msc.CalculateLoading_MainCal (empty_cal=_passedcal, loaded_cal=_des)
descriptions.append("%s+%s"%(_passedcal,_des))
msc.OutputProcessedData_MainCal(fname=cdict["processeddata_output_filename"]%("_".join(descriptions)))
else:
msg="Select description to use.\n"
but = []
for _i,_des in enumerate(cdict['descriptions']):
msg+='%d: %s'%(_i,_des)
but.append('%d: %s'%(_i,_des))
answer=msc.messenger(msg, but)
try:
mp = cdict['measure_parameters'][answer]
except IndexError:
mp = cdict['measure_parameters'][0]
mp['description']=cdict['descriptions'][answer]
exec(cmd)
if os.path.isfile(cdict['pickle_output_filename']):
msg = "Pickle file %s allready exist.\n\nOverwrite: Overwrite file\nAppend: Append to file."%(cdict['pickle_output_filename'])
but = ["Overwrite", "Append"]
answer = msc.messenger(msg, but)
if answer == but.index('Overwrite'):
mode = 'wb'
else:
mode = 'ab'
else:
mode = 'wb'
try:
msc.messenger(umdutil.tstamp()+" pickle results to '%s' ..."%(cdict['pickle_output_filename']), [])
pf = myopen(cdict['pickle_output_filename'], mode)
pickle.dump(msc, pf,2)
msc.messenger(umdutil.tstamp()+" ...done.", [])
except:
msc.messenger(umdutil.tstamp()+" failed to pickle to %s"%(cdict['pickle_output_filename']), [])
raise
else:
# remove autosave file after measurement is completed and class instance was pickled
try:
os.remove(cdict['autosave_filename'])
except:
pass
raw_input('Measurement completed. Press ENTER to close window.')
Diese Datei muss in der Regel nicht geändert werden, da Veränderungen am Messaufbau oder der Messparameter, wie z.B. der zu untersuchende Frequenzbereich durch Änderungen in der dot Datei bzw. in der Konfigurationsdatei dem Messprogramm mitgeteilt werden.
Zunächst werden wieder einige Module und plug-ins importiert. Das Modul pickle bzw. cpickle ist zur Erzeugung der pickle-Dateien erforderlich. MSC und umddevice sind an der Universität Magdeburg programmierte Module zur Durchführung der einzelnen Messroutinen bzw. zur Kommunikation mit den Messgeräten. Danach erfolgt die Vorbelegung der Variablen des dictionaries mit default-Werten. Diese werden dann später ggf. beim Einladen des Konfigurationsfiles aktualisiert. Anschließend werden einige Routinen definiert. Die Routine myopen liefert bei Aufruf die in der Variable name geforderte Datei zurück, sollte sie gepackt sein, wird sie vorher noch entpackt. Durch update_conf wird ein Update des Kofigurationsdictionaries durchgeführt, die bisherigen Einträge in dict also gegebenfalls durch neue Einträge ersetzt, die, in Abhängigkeit von der aufrufenden Routine, aus einer Autosavedatei, einer geladen pickle-Datei oder auch aus der mit dem Messprogramm aufgerufenen Konfigurationsdatei stammen können. Durch die Routine load_from_autosave wird eine Autosavedatei geladen. make_logger_list stellt eine Liste von für Protokolldateien zuständigen Routinen zur Verfügung. Dann beginnt in Zeile 133 das eigentliche Programm. Zunächst wird ein Update der Messvariablen durchgeführt und diese dann anschließend ausgegeben. Dann versucht das Messprogramm, eine Instanz der Klasse MSC zu erstellen. Hierzu wird zunächst mit Hilfe der Routine load_from_autosave überprüft, ob bereits eine Autosavedatei unter dem im Kofigurationsblockcdict angegebenen Namen existiert. Gibt es diese Autosavedatei, wird abgefragt, ob sie eingelesen werden soll und bei Bestätigung in Zeile 141 nach dem Einlesen der Daten der Autosavedatei die gespeicherte Instanz der Klasse MSC wieder erstellt. Der zweite zurückgelieferte Wert cmd liefert das Kommando zurück, das die Routine aufrief, in der die Autosavedatei erstellt wurde, also die Routine, die bei Speicherung der Daten gerade lief. Anschließend wird in Zeile 205 abgefragt, welche der unter verschiedenen Bezeichnungen abgespeicherten Messungen man verwenden möchte. Anschließend werden die aktuellen Messparameter mp übergeben und in Zeile 216 die gespeicherte begonnene Messung mit dem erneuten Aufruf der in cmd gespeicherten letzten aufgerufenen Routine an der gesicherten Stelle weitergeführt. Gibt es keine Autosavedatei unter dem angegebenen Namen oder soll diese nicht benutzt werden, wird der Messordner nach dem im cdict angegebenen pickle-file durchsucht und dieses geladen. In diesem Fall würde dann aus den in der pickle-Datei enthaltenen Daten die Instanz der Klasse MSC wieder erzeugt werden. Anschließend werden ab Zeile 152 dieser Instanz die Konfigurationen und die measurement_parameters aus dem cdict übergeben. Nun wird untersucht, ob in dieser Instanz bereits Messungen unter der description abgelegt sind, die für die aktuelle Messung laut Konfigurationsdatei benutzt werden sollen. Dies kann natürlich nur beim Laden eines alten pickle-files der Fall sein. Wird eine Messung gefunden, wird diese mit der entsprechenden description ausgegeben und in Zeile 172 abgefragt, wie weiter zu verfahren ist. Es besteht die Möglichkeit, die aktuelle Messung weiterzuführen (Continue). Weiterhin kann die aktuelle Messung abgebrochen und mit der Auswertung der vorhandenen Daten fortgefahren werden (Skip). Es ist ebenfalls möglich, sowohl die aktuelle Messung als auch die Auswertung abzubrechen (Break) oder das Messprogramm komplett zu beenden (Exit). Wird ein Fortsetzen der Messungen gewählt, würde der alte Datensatz aus dem picklefile überschrieben werden und die Routine msc.Measure_MainCal führt die Messung mit den in mp übergebenen Messparametern vom Zeitpunkt der erfolgten Sicherung an fort. Anschließend, bzw. wenn nur die Auswertung der Daten ausgewählt wurde, erfolgt in Zeile 198 erst durch die Routine msc.OutputRawData_MainCal die Ausgabe der Rohdaten in die im Konfigurationsblock cdict unter rawdata_output_filename angegebene Datei, anschließend durch die Routine msc.Evaluate_MainCal die Auswertung der Daten. Dabei wird überprüft sind Konfigurationsblock mehrere descriptions enthalten, wird überprüft, ob bereits Messungen mit anderen Bezeichnungen fertig sind und falls vorhanden die Datensätze der Messungen auch miteinander ausgewertet. Das wäre typischerweise der Fall, wenn die Kalibrierung der leeren und beladenen Kammer gleich innerhalb einer Messung durchgeführt wird, als Bezeichnungen könnten dann zum Beispiel empty und loaded gewählt werden. Dann könnte anschließend durch die Funktion msc.CalculateLoading_MainCal in Zeile 201 gleich das Loading der Kammer berechnet werden. Anschließend erfolgt in Zeile 203 durch die Routine msc.OutputProzessedData_MainCal die Ausgabe der ausgewerteten und geordneten Daten in die im Konfigurationsblock cdict unter prozesseddata_output_filename angegebene Datei. Sollten keine Sicherungsdateien vorhanden oder gewünscht werden, wird die eine neue Instanz der Klasse MSC erstellt und eine neue Messung mit den eben angesprochenen Routinen der Klasse MSC begonnen und anschließend ausgewertet. Diese Messung erhält dann als Bezeichnung den ersten Eintrag der Liste descriptions aus dem Konfigurationsblock. Die Messung wird dann für alle weiteren in description eingetragenen Bezeichnungen wiederholt. Nachdem mit der Ausgabe der Daten die Auswertung abgeschlossen ist, wird eine abschließende pickle-Datei angelegt, die alle bisherigen Messungen dieser Instanz der Klasse enthält, also die soeben beendete Messung samt Auswertung, sowie die, die in einer evtl. zuvor eingelesen Sicherungsdatei (Input-pickle-Datei oder autosavedatei) gespeichert waren. Der Name dieser Output-pickle-Datei wurde ebenfalls in der Konfigurationsdatei festgelegt. Zunächst wird in Zeile 218 geprüft, ob es bereits eine Datei unter diesem Namen gibt. Falls das der Fall ist, wird abgefragt, ob diese evtl. überschrieben werden soll, oder ob die neue pickle-Datei einfach an die vorhandene Datei angehängt werden soll. Nachdem die komplette Messung als Outputpickle-Datei gesichert wurde, wird letzlich noch die evtl. vorhanden Autosavedatei gelöscht, da sie ja durch die beendete Messung und Auswertung nicht benötig wird. Achtung: Wird die Messung aus einer Autosavedatei gestartet, wird nach Abschluss der Messung keine Auswertung ausgeführt, sondern nur das Output-pickle-file erstellt. In diesem Fall muss die Messung mit diesem Output-pickle-file als Input-pickle-file nocheinmal gestartet werden. Dann würde, wie oben beschrieben, die Meldung, dass im eingelesenen pickle-file bereits eine Messung mit der aktuellen description vorhanden ist und die Abfrage, was geschehen soll, erscheinen. Durch Auswahl von Skip wird dann die aktuelle Messung abgebrochen und es werden nur die vorhandenen Daten aus der gespeicherten Messung ausgewertet und man erhält so die Roh- und Ergebnisdaten. Das Messprogramm kann während der Messung jederzeit durch Drücken einer Taste gestoppt werden. Dies wird auch akustisch signalisiert. Der Ausgangssignal des Signalgenerators wird abgeschaltet, die Kammer kann also geöffnet und auch betreten werden. Gleichzeitig erfolgt eine Abfrage, wie weiter zu verfahren ist. Mit Continue kann die Messung fortgesetzt werden. Mit Suspend werden die Geräte vom Bus abgemeldet, die Instanz bleibt jedoch aktiv, da das Messprogramm auf weitere Eingaben wartet. Die Geräte können ausgeschaltet und auch aus dem Aufbau entfernt werden. Dies kann zum Beispiel genutzt werden, um die Akkus der Sonden zu laden oder Geräte kurzzeitig für andere Messungen zu benutzen, ohne dafür das Messprogramm unterbrechen zu müssen. Der Rechner darf jedoch während dieser Zeit nicht ausgeschaltet werden, da das Messprogramm ja noch läuft. Nachdem alle Geräte wieder angeschlossen und eingeschaltet sind, kann die Messung fortgesetzt werden. Hierzu werden alle Geräte neu initialisiert und die Messung läuft weiter. Mit Quit kann die Messung auch beendet werden. Abbildung 2.4 zeigt den Inhalt des Messordners nach Abschluss der Messung.
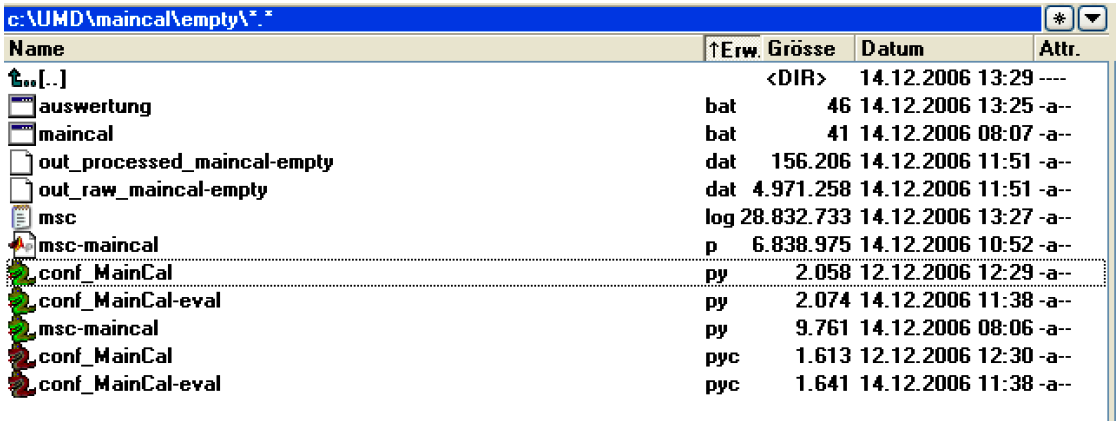
Messordnerinhalt nach Abschluss der Kalibriermessung¶
Messungen zur Untersuchung der Störfestigkeit¶
Der Ablauf einer typischen Störfestigkeitsmessung soll am Beispiel der Störschwellenuntersuchung an Einplatinen-Industrie-PCs erläutert werden. Bei dieser Untersuchung kamen die in der folgenden Abbilding gezeigten Industrie-PC-Boards der Firma ICP zum Einsatz. Die Messungen erfolgten im stirred-mode der Kammer, also bei einem sich kontinuierlich drehenden Rührer.
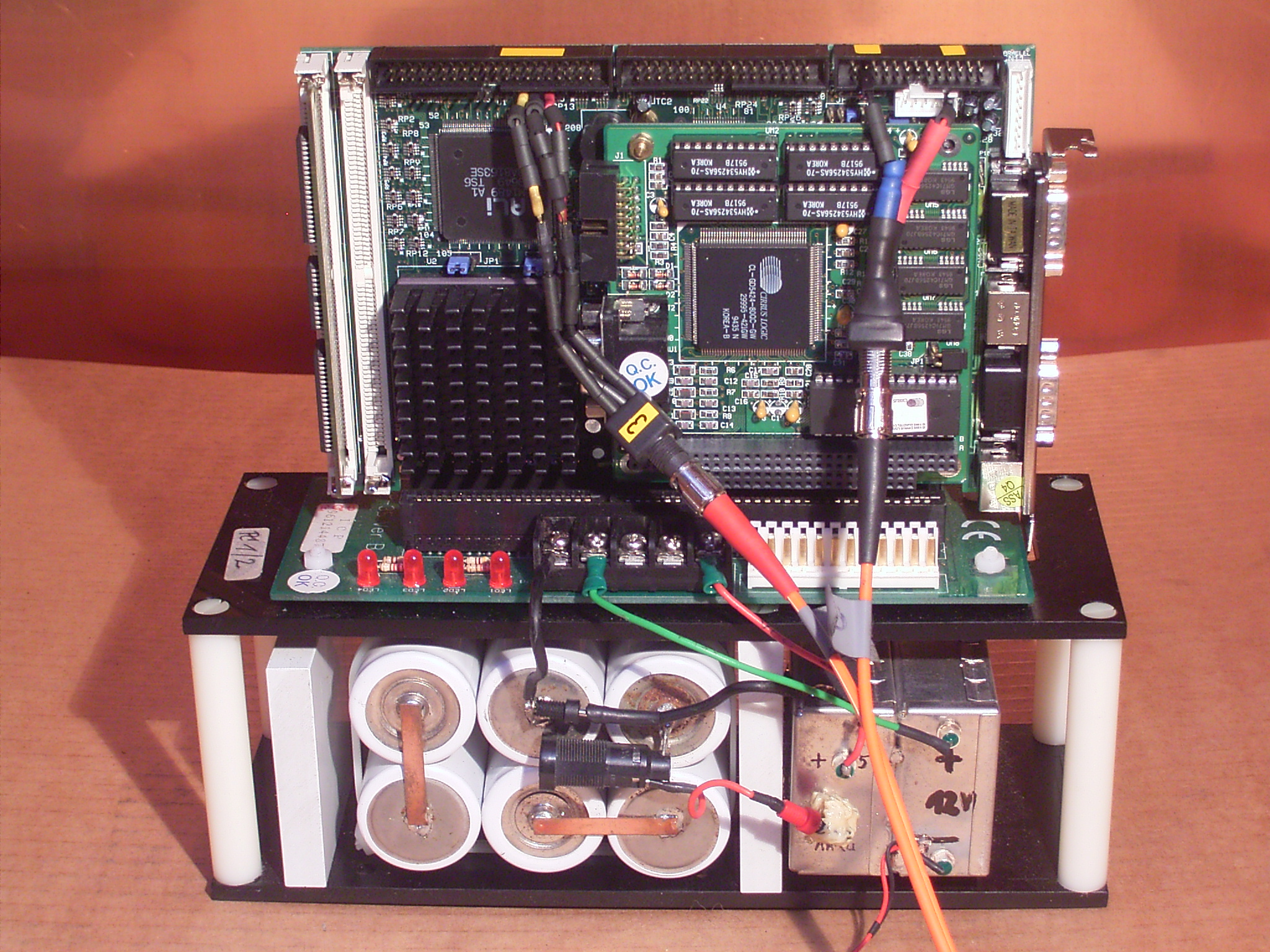
Untersuchte PC-Boards¶
Während der Untersuchungen lief auf den PCs jeweils ein Testprogramm, welches periodisch ein Bit des Parallelports kippte und so ein Rechtecksignal auf der Parallelschnittstelle ausgab. Dieses Testprogramm ist auf einem Flash-RAM auf dem Board gespeichert. Von der Parallelschnittstelle des Boards wurde dieses Signal über eine Lichtwellenleiterverbindung an eine Auswertebox, die außerhalb der Modenverwirbelungskammer steht, geleitet. In dieser Box wurde das Signal ausgewertet und konnte dann mit Hilfe eines Oszilloskops betrachtet werden. Über eine zweite Lichtwellenleiterverbindung der Box mit dem Board konnte der Rechner nach einem durch eine Störung (zu hohe Feldstärke) verursachter Ausfall durch Drücken eines RESET-Knopfes an der Box von Hand neu gestartet werden, falls er nicht von selbst neu bootete. In einigen Fällen konnte es auch vorkommen, dass selbst ein extern ausgelöstes Reset den Rechner nicht zu einem Neustart bewegen konnte, da entweder das Testprogramm beschädigt wurde und neu aufgespielt werden musste oder einfach die zur Energieversorgung dienenden Akkus leer waren und ersetzt werden mussten. Es wurde während der Messung zwischen 3 unterschiedlichen Rechnerausfallarten unterschieden:
Ausfall mit selbständigem Neustart des Rechners
Ausfall mit notwendigem externen RESET zum Rechnerneustart
Beschädigung des Testprogramms
Messablauf¶
Der Prüfling sollten während der Untersuchung mit cw-Signalen sowie mit pulsmodulierten Signalen unter Variation der Pulsparameter beaufschlagt werden.
In der folgenden Abbildung ist der prinzipielle Aufbau der Messung dargestellt.
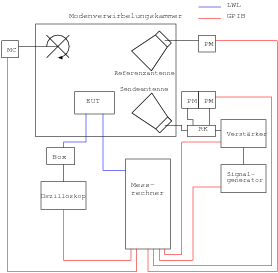
Schematischer Aufbau der Messung¶
Während der Messung wurde jeweils der zu untersuchende Frequenzbereich in Schritten von je 50 MHz durchfahren. Bei jeder Frequenz begann die Messung bei einer Feldstärke von 100 V/m. Jeweils nach einer vollen Umdrehung des Rührers im mode-stirred-Betrieb, bzw. nach dem Anfahren einer neuen Tunerposition im mode-tuned-Betrieb wurde das Ausgangssignal des PC-Boards überprüft. Wurde das Testsignal detektiert, lief der Rechner also noch anstandslos, wurde die Feldstärke um 10 V/m erhöht. Um die Boards und das Messequipment im Inneren der Kammer vor Zerstörung zu schützen, wurde die maximale Testfeldstärke auf 1000 V/m begrenzt. Dies war nötig, da sich bei vergangenen Messungen zeigte, dass bei noch höheren Feldstärken die in den Leiterbahnen induzierten Ströme so groß werden, daß durch die entsprechende Hitzewirkung das Equipment mechanisch zerstört werden kann. Sollte ein Ausfall des Rechners festgestellt werden, wurde, wie bereits angedeutet, zwischen verschiedenen Störungen unterschieden. Fuhr der PC selbständig wieder hoch, wurde ein interner RESET notiert. War zum Neustart des Rechners ein RESET-Impuls über den Lichtwellenleiter notwendig, wurde vom externen RESET gesprochen. Konnte das Testsignal auch nach einem externen RESET nicht detektiert werden, mussten entweder neue geladene Akkus angeschlossen werden, dies wurde dann selbstverständlich nicht als Fehler detektiert, sondern die Messung wured in diesem Fall bei dieser Frequenz wiederholt. In einigen Fällen wurde allerdings das Testprogramm auf den Boards zerstört und musste an einem gesonderten Rechner neu eingespielt werden. In diesem Fall wurde ein User-RESET aufgezeichnet.
Vorbereitungen¶
Zunächst stellte sich aus Effiziensgründen die Aufgabe, die Überwachung des Prüflings und, falls erforderlich, den Neustart des PCs zu automatisieren und in den Messablauf zu integrieren. Hierzu wurde zunächst die Überwachung des durch das Testprogramm erzeugten Ausgangssignals mit Hilfe eines Oszilloskops TDS420 der Firma Tektronix durch die Messsoftware realisiert. Während der Messung wird ständig die Amplitude des Signals während der Einschalt- und Ausschaltzeit sowie die Periodendauer des Signals gemessen und mit vorgegebenen Schwellwerten verglichen. Diese Messung erfolgt immer nach einem kompletten Rührerumlauf. Wird einer der Schwellwerte überschritten, wird das Ereignis als Ausfall markiert. Das Messprogramm stoppt für einen gewissen Zeitraum, nach einigen Tests hat sich eine Zeitspanne von 25 Sekunden als ausreichend erwiesen, um dem Rechner die Möglichkeit zu geben, selbstständig neu zu booten. Nach Ablauf dieser Zeit wird das Ausgangssignal erneut überprüft. Sollte es immer noch nicht vorhanden sein, wird ein RESET über die Lichtwellenleiterverbindung ausgelöst und abermals eine eine gewisse Zeit gewartet. Sollte das Signal dann immer noch nicht anliegen, stoppt die Messung mit einer optischen und akustischen Meldung an den Benutzer. Dieser hat dann die Möglichkeit, zu überprüfen, ob die Akkus leer sind und neu aufgeladen werden müssen oder ob ein Fehler am Board aufgetreten ist und das Testprogramm neu aufgespielt werden muss. Weiterhin wurde die RESET-Auslösung über die Lichtwellenleiterverbindung automatisiert. Hierzu wurde die Schaltung in der Auswertebox etwas modifiziert. Es wurde eine identische Laserdiode über einen Vorwiderstand direkt mit dem Parallelport des Messplatzrechners verbunden. Zur RESET-Auslösung wird das entsprechende Bit des Parallelports kurz auf „high“-Potential geschaltet und somit der RESET-Impuls ausgelöst. Da es unter dem Betriebssystem Windows XP nicht mehr ohne weiteres möglich ist, auf die externen Schnittstellen des Rechners zuzugreifen, war zusätzliche Software nötig, um dies dennoch zu ermöglichen. Diese Programmbibliothek wurde dann ebenfalls als Teil eines Programms in die Softwareumgebung eingebunden. Wie bereits angesprochen, ist es günstiger, für jede Messung einen gesonderten Ordner zu benutzen, um in diesem alle Daten zu speichern. In dieses Ordner gehören jeweils die Konfigurationsdatei, das aufrufende Messprogramm und evtl. die entsprechende .dot-Datei. In Abbildung 3.3 ist ein Beispiel für den Inhalt eines Messordners zu sehen. Zusätzlich befindet sich im Ordner noch eine Textdatei mit dem Namen info.txt, in der Anmerkungen, Besonderheiten und anderes Wissenswertes zur jeweiligen Messungen notiert werden können sowie 2 …eval.py Dateien, die zur weiteren Bearbeitung der Messwerte dienen.
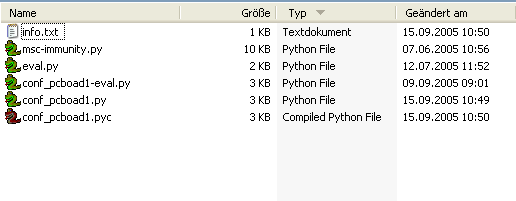
Messordnerinhalt vor Beginn der Messung¶
Die dot-Datei¶
Wie bereits erwähnt, wurde während der Messreihe immer der selbe Messaufbau benutzt. Daher wurde die dot-Datei zentral im Sammelordner für dot-Dateien abgelegt und von dort aufgerufen.
Sie ist im folgenden Listing dargestellt:
digraph {
node [fontsize=12];
graph [fontsize=12];
edge [fontsize=10];
rankdir=LR;
cbl_amp_ant [ini="M:\\umd-config\\smallMSC\\ini\\cbl_amp_ant.ini" condition="10e6 <= f <= 4.2e9"] [color=white, fontcolor=white ]
cbl_amp_pm1 [ini="M:\\umd-config\\smallMSC\\ini\\cbl_amp_pm1.ini" condition="10e6 <= f <= 4.2e9"] [color=white, fontcolor=white ]
cbl_ant_pm2 [ini="M:\\umd-config\\smallMSC\\ini\\cbl_ant_pm2.ini" condition="10e6 <= f <= 4.2e9"] [color=white, fontcolor=white ]
sg [ini="M:\\umd-config\\smallMSC\\ini\\umd-gt-12000A-real.ini"] [style=filled,color=lightgrey]
amp [ini="M:\\umd-config\\smallMSC\\ini\\umd-ar-100s1g4-3dB-real.ini" condition="800e6 <= f <= 4.2e9"]
ant [ini="M:\\umd-config\\smallMSC\\ini\\umd-rs-HF906_04.ini"] [style=filled,color=lightgrey]
refant [ini="M:\\umd-config\\smallMSC\\ini\\umd-rs-HF906_03.ini"] [style=filled,color=lightgrey]
tuner [ini="M:\\umd-config\\smallMSC\\ini\\umd-sms60-real.ini" ch=1] [style=filled,color=lightgrey]
pmref [ini="M:\\umd-config\\smallMSC\\ini\\umd-rs-nrvd-2-real.ini" ch=1] [style=filled,color=lightgrey]
pm1 [ini="M:\\umd-config\\smallMSC\\ini\\umd-rs-nrvd-1-real.ini" ch=1] [style=filled,color=lightgrey]
pm2 [ini="M:\\umd-config\\smallMSC\\ini\\umd-rs-nrvd-1-real.ini" ch=2] [style=filled,color=lightgrey]
cbl_sg_amp [ini="M:\\umd-config\\smallMSC\\ini\\cbl_sg_amp.ini" condition="10e6 <= f <= 18e9"] [color=white, fontcolor=white ]
cbl_r_pmr [ini="M:\\umd-config\\smallMSC\\ini\\cbl_r_pmr.ini" condition="10e6 <= f <= 18e9"] [color=white, fontcolor=white ]
att20 [ini="M:\\umd-config\\smallMSC\\ini\\att20-50W.ini" condition="10e6 <= f <= 18e9"] [color=white, fontcolor=white ]
a1 [style=filled,color=lightgrey]
a2 [style=filled,color=lightgrey]
subgraph cluster_amp {
label=amp
amp_in -> amp_out [dev=amp what="S21"]
}
sg->a1 [dev=cbl_sg_amp what="S21"] [label="cbl_sg_amp"]
a1->amp_in
amp_out->a2
a2->ant [dev=cbl_amp_ant what="S21"] [label="cbl_amp_ant"]
a2->pm1 [dev=cbl_amp_pm1 what="S21"] [label="cbl_amp_pm1"]
refant->feedthru [dev=cbl_r_pmr what="S21"] [label="cbl_r_pmr"]
feedthru->pmref [dev=att20 what="S21"] [label="att20"]
ant->pm2 [dev=cbl_ant_pm2 what="S21"] [label="cbl_ant_pm2"]
subgraph "cluster_msc" {label=MSC; ant; refant}
subgraph "cluster_pmoutput" {label="output"; pm1; pm2 ;pmref;}
}
Der daraus resultierende Aufbau sieht wie folgt aus:
![digraph {
node [fontsize=12];
graph [fontsize=12];
edge [fontsize=10];
rankdir=LR;
cbl_amp_ant [ini="M:\\umd-config\\smallMSC\\ini\\cbl_amp_ant.ini" condition="10e6 <= f <= 4.2e9"] [color=white, fontcolor=white ]
cbl_amp_pm1 [ini="M:\\umd-config\\smallMSC\\ini\\cbl_amp_pm1.ini" condition="10e6 <= f <= 4.2e9"] [color=white, fontcolor=white ]
cbl_ant_pm2 [ini="M:\\umd-config\\smallMSC\\ini\\cbl_ant_pm2.ini" condition="10e6 <= f <= 4.2e9"] [color=white, fontcolor=white ]
sg [ini="M:\\umd-config\\smallMSC\\ini\\umd-gt-12000A-real.ini"] [style=filled,color=lightgrey]
amp [ini="M:\\umd-config\\smallMSC\\ini\\umd-ar-100s1g4-3dB-real.ini" condition="800e6 <= f <= 4.2e9"]
ant [ini="M:\\umd-config\\smallMSC\\ini\\umd-rs-HF906_04.ini"] [style=filled,color=lightgrey]
refant [ini="M:\\umd-config\\smallMSC\\ini\\umd-rs-HF906_03.ini"] [style=filled,color=lightgrey]
tuner [ini="M:\\umd-config\\smallMSC\\ini\\umd-sms60-real.ini" ch=1] [style=filled,color=lightgrey]
pmref [ini="M:\\umd-config\\smallMSC\\ini\\umd-rs-nrvd-2-real.ini" ch=1] [style=filled,color=lightgrey]
pm1 [ini="M:\\umd-config\\smallMSC\\ini\\umd-rs-nrvd-1-real.ini" ch=1] [style=filled,color=lightgrey]
pm2 [ini="M:\\umd-config\\smallMSC\\ini\\umd-rs-nrvd-1-real.ini" ch=2] [style=filled,color=lightgrey]
cbl_sg_amp [ini="M:\\umd-config\\smallMSC\\ini\\cbl_sg_amp.ini" condition="10e6 <= f <= 18e9"] [color=white, fontcolor=white ]
cbl_r_pmr [ini="M:\\umd-config\\smallMSC\\ini\\cbl_r_pmr.ini" condition="10e6 <= f <= 18e9"] [color=white, fontcolor=white ]
att20 [ini="M:\\umd-config\\smallMSC\\ini\\att20-50W.ini" condition="10e6 <= f <= 18e9"] [color=white, fontcolor=white ]
a1 [style=filled,color=lightgrey]
a2 [style=filled,color=lightgrey]
subgraph cluster_amp {
label=amp
amp_in -> amp_out [dev=amp what="S21"]
}
sg->a1 [dev=cbl_sg_amp what="S21"] [label="cbl_sg_amp"]
a1->amp_in
amp_out->a2
a2->ant [dev=cbl_amp_ant what="S21"] [label="cbl_amp_ant"]
a2->pm1 [dev=cbl_amp_pm1 what="S21"] [label="cbl_amp_pm1"]
refant->feedthru [dev=cbl_r_pmr what="S21"] [label="cbl_r_pmr"]
feedthru->pmref [dev=att20 what="S21"] [label="att20"]
ant->pm2 [dev=cbl_ant_pm2 what="S21"] [label="cbl_ant_pm2"]
subgraph "cluster_msc" {label=MSC; ant; refant}
subgraph "cluster_pmoutput" {label="output"; pm1; pm2 ;pmref;}
}](../_images/graphviz-f67ed6ec1c88a424ccfb9510fcdb647dbe20169a.png)
Konfigurationsdatei¶
Kommen wir nun zur Konfigurationsdatei conf_pcboad1.py, welche im folgenden Listing zu sehen ist:
import os
import umdutil
import scipy
import ImmunityThresholdTDS4 as ImmunityThreshold
umdpath=umdutil.getUMDPath()
dotfile = umdutil.GetFileFromPath('smallMSC-immunity-no-fp.dot', umdpath)
print 'DOTFILE:', dotfile
testfreqs = scipy.arange(3.3e9,3.85e9,50e6).tolist()
field=range(100,1010,10)
kernel = ImmunityThreshold.ImmunityKernel_Thres
#kpars = {'tp': None, 'field': field, 'dwell': 1, 'testfreqs': testfreqs}
kpars = {'tp': None,
'field': field,
'dwell': 3,
'testfreqs': testfreqs,
'what': {6: (200e3,400e3), 7: (3.5,4.5), 8: (-0.5,0.5)},
'PMfreq': 1e6,
'PMduty': 15} #take care: duty is in %
print kernel, kpars
theboard = 'PCBoard1'
maincal = 'I:\\Messungen\\smallMSC\\cal-4-05\\msc-maincal-loading.p'
eutcal='M:\\testing\\eutcal\\board01\\msc-eutcal-with-loading.p'
cal=maincal
cdict = {"autosave_filename": 'msc-autosave.p',
"pickle_output_filename": 'msc-immunity.p',
"pickle_input_filename": cal,
"rawdata_output_filename": 'out_raw_immunity-%s.dat',
"processeddata_output_filename": 'out_processed_immunity-%s.dat',
"log_filename": 'msc.log',
"logger": ['stdlogger'],
"minimal_autosave_interval": 3600,
"descriptions": [theboard],
"measure_parameters": [{'dotfile': dotfile,
'calibration': 'empty',
'kernel': (kernel,kpars),
'leveling': None,
'freqs': testfreqs,
'names': {'sg': 'sg',
'a1': 'a1',
'a2': 'a2',
'ant': 'ant',
'pmfwd': 'pm1',
'pmbwd': 'pm2',
'fp': [],
'tuner': ['tuner'],
'refant': ['refant'],
'pmref': ['pmref']
}
}],
"evaluation_parameters": [{'empty_cal': "empty",
'loaded_cal': "loaded",
'EUT_cal': theboard
}]
}
Zunächst werden einige zusätzliche notwendige Module geladen.
Das Modul os ist ein von Python zur Verfügung gestelltes Modul
zur Zusammenarbeit mit dem Betriebssystem.
Das Modul umdutil enthält
nützliche Tools für die Messroutinen und Auswertung und wird vom
Entwicklerteam der Universität Magdeburg bereitgestellt und betreut,
daher auch der Name uni md utillities.
Mit Hilfe des Moduls scipy
(Scientific Tools for Python) kann man Python sehr gut für numerische
Rechnungen einsetzen.
Das Modul ImmunityThreshold schließlich enthält
den eigentlichen Mess-Kernel und muss vom Anwender entsprechend der
gewünschten Messung zur Verfügung gestellt werden.
In Zeile 6 wird eine Umgebungsvariable abgefragt und der Variable umdpath zugeordnet. Diese Umgebungvarable muss unter dem Namen UMDPATH auf dem benutzten Arbeitsplatzrechner eingerichtet werden und enthält alle Pfade, in denen das Messprogramm nach benötigten Dateien suchern soll, wenn sich selbige nicht im Messordner befinden oder mit Verweis auf den vollständigen Pfad übergeben werden. Eine dieser Dateien wäre zum Beispiel die .dot Datei.
Da bei der durchgeführten Messreihe immer wieder der selbe Messaufbau benutzt wurde, wurde die .dot Datei aus Kapazitätsgründen nicht in jeden Ordner koipiert, sondern in einem Sammelordner für .dot Dateien, dessen Pfad ebenfalls in der Umgebungsvariable UMDPATH enthalten sein muss.
In Zeile 7 sucht dann
der Befehl umdutil.GetFileFromPath() aus dem Modul umdutil nach dem
übergebenen Namen der .dot Datei (smallMSC-immunity-no-fp.dot). Diese
Suche erfolgt erst im eigenen Messordner. Falls die Datei dort nicht
gefunden wird, werden die Pfade, die in UMDPATH abgelegt sind, der
Reihenfolge nach durchsucht, daher wird ebenfalls die Variable umdpath
beim Befehlsaufruf übergeben. Alternativ kann der Name der benötigten
.dot Datei auch direkt der Variablen umdpath zugewiesen werden. Wenn
sie in einem anderen Ordner als dem Messordner liegt, ist dazu
natürlich die Angabe mit Pfad nötig.
In Zeile 8 erfolgt Befehl, zur Kontrolle noch einmal auszugeben, welche dot Datei nun für die Messung verwendet wird.
In Zeile 10 und 12 erfolgt die Definition, bei welchen Frequenzen und Feldstärken die Messungen durchgeführt werden sollen. In diesem Fall soll also der Frequenzbereich von 3,3 GHz bis 3,85 GHz in Schritten von 50 MHz durchfahren werden und die Feldstärke jeweils in 10 V/mSchritten von 100 V/m bis 1000 V/m erhöht werden.
Wird die Kammer im tuned mode betrieben, könnte hier auch definiert werden, bei welchen Tunerpositionen gemessen werden soll. Da in diesem Beispiel die Messung im stirred mode erfolgte, ist das hier jedoch nicht nötig.
In Zeile 14 wirde definiert, welcher Kernel für die Messung genutzt werden soll. Anschließend erfolgt die Angabe der Parameter für den Kernel.
Zeile 15 ist auskommentiert und spielt daher keine Rolle, die Parameter werden ab Zeile 16 übergeben:
- tp bezeichnet die Tunerpositionen, bei denen gemessen werden soll. Hier
würde die im vohergehenden Schritt definierte Liste oder das dictionary mit den Tunerpositionen übergeben werden. Wird nichts übergeben, werden die Tunerpositionen benutzt, die auch während der Kalibrierung Verwendung fanden. Wird ein None übergeben, wird davon ausgegangen, dass die Messung im stirred mode erfolgt, der Tuner wird vom Messprogramm nicht angesprochen und muss eigenhändig in Bewegung gebracht werden.
field erhält die Liste der Testfeldstärken.
testfreqs bekommt die Liste der zu untersuchenden Frequenzen.
- dwell bezeichnet die Zeit, die der Prüfling jeweils bei entsprechender
Tunerposition und Frequenz der Testfeldstärke ausgesetzt ist. Hierbei ist es wichtig, das Zeitverhalten des Prüfling einschätzen zu können. Sollten die Messungen im stirred mode durchgeführt werden, sollte dwell mindest der Zeit für einen Tunerumlauf entsprechen.
- what enthält hier die Parameter für die Prüflingsüberwachung. Da in
diesem Beispiel das Rechtecksignal auf Pulsdauer, High-Pegel und Low-Pegel überwacht wurde, werden hier jeweils die Minimalwerte und Maximalwerte der Parameter übergeben, also das Wertefenster, innerhalb dessen das Signal noch als gültiges Signal gewertet wird, der Prüfling also fehlerfrei arbeitet.
- PMfreq gibt die Pulswiederholrate an, da
in diesem Beispiel der Prüfling mit pulsmodulierten Signalen beaufschlagt wurde.
- PMduty bezeichnet das Tastverhältnis der
Pulsmodulation in Prozent.
Danach wird der aktuell benutze Kernel inklusive seiner Parameter noch einmal zur Kontrolle ausgegeben. Anschließend folgen noch eine Datei und Namenszuweisungen.
Da der Kernel intern bestimmte Variablennamen verwendet, die nicht mit den übergebenen oder auszugebenen Varialblen oder Dateien übereinstimmen muss, ist es notwendig diese vorher noch anzugeben.
Abschließend wird noch ein Konfigurationsblock cdict erzeugt, dass alle festgelegten Parameter, Dateien und Namen enthält und dann vom aufrufenden Messprogramm ausgewertet bzw. der Instanz der MSC-Klasse übergeben wird. Hierbei befinden sich jeweils an erster Stelle die Namen, die von der Software intern benutzt werden, gefolgt von den Bezeichnungen, die der Anwender wünscht oder bereits verwendet hat.
Die Punkte bedeuten im Einzelnen:
- autosave_filename ist der Name
der Autosave-Datei.
- pickle_output_filename ist der Name der
auszugebenen pickle-Datei.
- pickle_input_filename ist der Name einer
schon vorhandenen pickle-Datei, die vor Beginn der Messungen eingelesen werden soll.
- rawdata_output_filename ist der Name der
Ausgabedatei für die unbehandelten Messdaten.
- processeddata_output_filename ist Name der Ausgabedatei für die
Ergebnisdaten.
- log_logfilename ist der Name der Datei, die alle
Vorgänge während der Messung mitprotokolliert.
- logger legt die
Routine zum Führen der Protokolldatei fest.
- minimal_autosave_interval ist die minimale Zeitspanne für die
Autosaves in Sekunden, im Beispiel also eine Stunde.
- description ist
die Bezeichnung für die aktuelle Messung.
Anschließend erfolgt die Übergabe der Messparameter für die Instanz der MSC-Klasse. Dabei werden folgende Werte übergeben:
- dotfile ist der Name der, den Aufbau
charakterisierenden, dot-Datei, welche weiter oben bereits definiert wurde.
- calibration bezeichnet den Namen der Kalibrierung, dessen
Werte bei der Rechnung verwendet werden sollen.
- kernel verweist auf
den zu benutzenden Kernel samt seiner Parameter, die weiter oben definiert wurden.
- freqs sind die zu untersuchenden Frequenzen, die
auch als Kernelparameter schon übergeben wurden.
- names sind die
Bezeichnungen der Elemente der Messkette. Hierbei sind die Namen, die der Anwender für die Elemente in der dot Datei benutzt, zu übergeben. Letztlich werden noch die Namen angegeben, unter denen die Kalibrierungen im pickle-file abgelegt sind. Diese Informationen werden von der Auswerteroutine benötigt.
Messung¶
Zum Start der Messung muss man sich im Konsolenmodus befinden. Dazu ruft man über die Eingabeaufforderung auf und gibt das Kommando cmd ENTER ein. Anschließend wechselt man in der sich öffnenden Konsole in das Verzeichnis des aktuellen Messordners. Dort ruft man zum Start in der Umgebung python das Messprogramm, gefolgt vom Konfigurationsfile, auf. Dies ist in der folgenden Abbildung zu sehen.
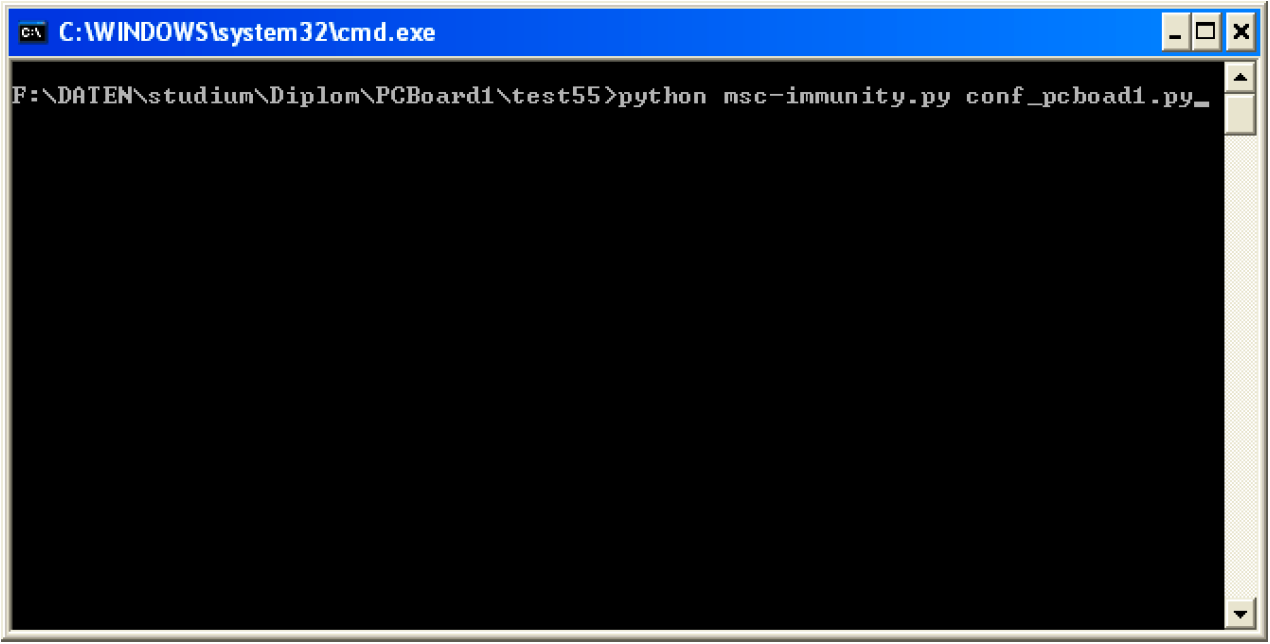
Aufruf des Messprogramms¶
Die eigentliche Messung verläuft bei Störfestigkeitsmessungen nach einem etwas anderen Schema.
Zunächst wird ebenfalls durch das aufrufende Messprogramm, hier msc-immunity.py, eine Instanz der Klasse MSC
erzeugt. Dieser Instanz wird innerhalb der Messparameter measurement_parameters auch ein Verweis auf
den zu benutzenden Messkernel sowie dessen Parameter übergeben.
Anders als bei Kalibrier- und Emissionsmessungen in denen die MSC Klasse die Informationen über
den Ablauf der Messungen enthält, sind diese Informationen bei Störfestigkeitsmessungen in diesem
Messkernel enthalten. Dieses ist aus Flexibilitätsgründen erforderlich, da sich bei
Störfestigkeitsmessungen der Ablauf der Messungen häufig ändern kann, beispielsweise könnte die
Testfeldstärke langsam erhöht werden oder der Prüfling auch gleich mit einer Grenzfeldstärke
beaufschlagt werden. Außerdem muss die EUT-Überwachung während der
Messungen realisiert werden.
Aus diesem Grund werden die Informationen über den Ablauf der Messung in einen Kernel ausgelagert,
der dann entsprechend der gewünschten Messung vom Anwender zur Verfügung editiert werden muss.
Die Instanz der MSC Klasse erzeugt dann eine Instanz dieses Messkernels und
übergibt dieser die Kernelparameter. Die Kernelinstanz bestimmt dann den Ablauf der Messung incl.
EUT-Überwachung und leitet die MSC-Instanz somit bei der Durchführung der Messung an.
Der Messkernel ImmunityThreshholdTDS4.py¶
Der Aufbau des Messkernels ist im folgenden Listing zu sehen:
import time
import umdutil
import umddevice
import pprint
import TDSClass
class ImmunityKernel_Thres:
def __init__(self, messenger,
UIHandler,
locals,
dwell,
keylist='sS',
tp=None,
field=None,
testfreqs=None,
what=None,
PMfreq=None,
PMduty=None):
self.field=field
self.mg=locals['mg']
names=locals['names']
ddict=locals['ddict']
self.sg=ddict[names['sg']]
self.testfreqs=testfreqs
self.goto_next_freq=False
if self.field is None:
self.field=range(10,110,10)
self.tp=tp
self.what=what
self.messenger=messenger
self.UIHandler=UIHandler
self.callerlocals=locals
try:
self.in_as=self.callerlocals['in_as']
except KeyError:
self.in_as={}
self.messenger(pprint.pformat(self.in_as),[])
self._testplan = self._makeTestPlan()
self.dwell = dwell
self.keylist = keylist
self.history=[]
if PMfreq is not None and PMduty is not None:
self.sg.ConfPM(0,PMfreq,0,1.0/PMfreq*PMduty*0.01,0)
self.sg.PMOn()
self.parport = TDSClass.ParPort(on = 255,
off= 0,
port = 0x378,
initstat = 0x0,
dllname = 'm:\\dlls\\inpout32.dll')
self.tds = TDSClass.TDS420_EUT_Handler(EUTdll= 'm:\\dlls\\eut-tds420-simple.dll',
INIFILE= 'M:\\umd-config\\smallMSC\\ini\\eut-tds420-simple.ini')
def _makeTestPlan(self):
ret = []
if self.tp is None: # stirred
freqs = self.testfreqs[:]
for f in freqs:
has_f=f in self.in_as.keys()
self.messenger( "f=%e in in_as.keys()?: %r"%(f,has_f), [])
if has_f:
continue
ret.append(('LoopMarker', '', {}))
ret.append(('rf', '', {'rfon': 0}))
ret.append(('autosave', '', {}))
ret.append(('freq', '', {'freq': f}))
for _e in self.field:
try:
_e=umdevice.UMDMResult(_e,umddevice.UMD_Voverm)
except:
pass
ret.append(('efield', '', {'efield': _e}))
ret.append(('rf', '', {'rfon': 1}))
ret.append(('measure', '', {}))
ret.append(('eut', None, None))
ret.append(('rf', '', {'rfon': 0}))
ret.append(('finished', '', {}))
else: #tuned
freqs = self.tp.keys()
freqs.sort()
for f in freqs:
has_f=f in self.in_as.keys()
if has_f:
continue
ret.append(('LoopMarker', '', {}))
ret.append(('rf', '', {'rfon': 0}))
ret.append(('autosave', '', {}))
ret.append(('freq', '', {'freq': f}))
for _e in self.field:
try:
_e=umdevice.UMDMResult(_e,umddevice.UMD_Voverm)
except:
pass
ret.append(('efield', '', {'efield': _e}))
for t in self.tp[f]:
ret.append(('tuner', '', {'tunerpos': t[:]}))
ret.append(('rf', '', {'rfon': 1}))
ret.append(('measure', '', {}))
ret.append(('eut', None, None))
ret.append(('rf', '', {'rfon': 0}))
ret.append(('finished', '', {}))
ret.reverse()
return ret
def test (self, stat):
if stat == 'AmplifierProtectionError':
self.messenger(umdutil.tstamp()+" RFOff ...", [])
self.mg.RFOff_Devices()
self.goto_next_freq=True
if self.goto_next_freq:
cmd = self.__goto_next_freq()
else:
cmd = self._testplan.pop()
#overread LoopMarker
while cmd[0]=='LoopMarker':
cmd = self._testplan.pop()
self.history.append(cmd)
if cmd[0] == 'eut':
self.messenger (umdutil.tstamp()+" Start EUT checking...", [])
stat, detail = self.tds.TestEUT(self.what,self.dwell)
detail['OK_after_internal_reset'] = None
detail['OK_after_external_reset'] = None
detail['OK_after_user_reset'] = None
if not stat:
self.messenger (umdutil.tstamp()+" Start EUT checking again...", [])
stat, detail = self.tds.TestEUT(self.what,self.dwell)
detail['OK_after_internal_reset'] = None
detail['OK_after_external_reset'] = None
detail['OK_after_user_reset'] = None
if not stat:
self.messenger (umdutil.tstamp()+" Start EUT checking again...", [])
stat, detail = self.tds.TestEUT(self.what,self.dwell)
detail['OK_after_internal_reset'] = None
detail['OK_after_external_reset'] = None
detail['OK_after_user_reset'] = None
if not stat:
self.messenger (umdutil.tstamp()+" Start EUT checking again...", [])
stat, detail = self.tds.TestEUT(self.what,self.dwell)
detail['OK_after_internal_reset'] = None
detail['OK_after_external_reset'] = None
detail['OK_after_user_reset'] = None
if not stat:
self.messenger (umdutil.tstamp()+" Start EUT checking again...", [])
stat, detail = self.tds.TestEUT(self.what,self.dwell)
detail['OK_after_internal_reset'] = None
detail['OK_after_external_reset'] = None
detail['OK_after_user_reset'] = None
if not stat:
remeasure=False
self.messenger (umdutil.tstamp()+" TestEUT returns stat=%r, detail=%r"%(stat,detail), [])
self.messenger (umdutil.tstamp()+" RFOff", [])
self.mg.RFOff_Devices()
self.messenger (umdutil.tstamp()+" Going to sleep for 25 seconds...", [])
time.sleep(25)
self.messenger (umdutil.tstamp()+" ... back. Check EUT again...", [])
stat2,detail2=self.tds.TestEUT(self.what,1)
self.messenger (umdutil.tstamp()+" TestEUT returns stat=%r, detail=%r"%(stat2,detail2), [])
detail['OK_after_internal_reset'] = stat2
if not stat2: # still not ok
self.messenger (umdutil.tstamp()+" Doing hard reset...", [])
self.parport.doReset()
self.messenger (umdutil.tstamp()+" Going to sleep for 25 seconds...", [])
time.sleep(25)
self.messenger (umdutil.tstamp()+" ... back. Check EUT again...", [])
stat2,detail2=self.tds.TestEUT(self.what,1)
self.messenger (umdutil.tstamp()+" TestEUT returns stat=%r, detail=%r"%(stat2,detail2), [])
detail['OK_after_external_reset'] = stat2
while not stat2: # give up and wait for user
msg = "Unable to recover EUT status after external reset.\n\nContinue: Continue measurement after EUT reset by user.\nQuit: Quit measurement."
but = ["Continue", "Quit"]
answer = self.messenger(msg, but)
if answer == but.index('Quit'):
self.messenger(umdutil.tstamp()+" measurement terminated by user.", [])
raise UserWarning # to reach finally statement
elif answer == but.index('Continue'):
msg2 = "Measure this frequency again?\n\nYes: Measure again\nNo: Continue with next frequency."
but2 = ["Yes", "No"]
answer2 = self.messenger(msg2, but2)
if answer2 == but2.index('Yes'):
remeasure=True
else:
remeasure=False
comment = raw_input('Comment: ')
detail['comment'] = comment
stat2,detail2=self.tds.TestEUT(self.what,1)
detail['OK_after_user_reset'] = stat2
if remeasure:
self.history.reverse()
self._testplan.extend(self.history)
cmd = (None, "", {})
else:
cmd=('eut', 'stat!=0', {'eutstatus': detail.copy()})
self.goto_next_freq=True
else:
cmd=('eut', '', {'eutstatus': 'OK'})
else:
cmd=('eut', '', {'eutstatus': 'OK'})
else:
cmd=('eut', '', {'eutstatus': 'OK'})
else:
cmd=('eut', '', {'eutstatus': 'OK'})
else:
cmd=('eut', '', {'eutstatus': 'OK'})
self.messenger(umdutil.tstamp()+" ... EUT checking done.", [])
return cmd
def __goto_next_freq(self):
self.goto_next_freq=False
self.history=[]
while True:
cmd = self._testplan.pop()
if cmd[0] in ('LoopMarker', 'finished'):
break
return cmd
Zunächst werden wieder einige Module geladen, das Modul TDSClass regelt die Kommunikation mit
dem Oszilloskop TDS 420, mit dem die Überwachung des Ausgangsimpulses des PC-Boards erfolgte. Anschließend wird die Klasse ImmunityKernel_Thres mit einigen Parametern erzeugt und einige Variablen festgelegt. Hier finden sich unter anderem die Parameter wieder, die in der Konfigurationsdatei festgelegt wurden. In Zeile 45 und 50 werden Instanzen der Klassen ParPort und TDS420_EUT_Handler aus dem Modul TDSClass erzeugt, die für die Resetauslösung beim EUT sowie für die Überwachung des selbigen verantwortlich sind. Anschließend wird der Messablauf festgelegt, also die Schleifen, in denen Tunerpositionen, Frequenzen und Feldstärken während der Messung verändert werden. Im Beispielkernel liegt die Frequenzschleife außen und die Tunerschleife ganz innen, es wird also zunächst eine Frequenz eingestellt, dann ein Feldstärkelevel gewählt und anschließend der Tuner im stirred oder tuned mode eine Umdrehung bewegt. Sollte kein EUT-Ausfall detektiert worden sein, wird das Feldstärkelevel erhöht und wieder der Tuner gedreht. Dies erfolgt so lange, bis ein Ausfall des EUT detektiert wurde oder der Prüfling mit der maximalen zu untersuchenden Feldstärke beaufschlagt wurde. Dann wird die nächste Frequenz angefahren und die Untersuchung weitergeführt. Die Wahl, in welcher Schleife welche Größe geändert wird, liegt beim Anwender, wobei die Bestrebungen dahin gehen sollten, die Messung möglichst effektiv zu gestalten. Achtung: Im stirred mode der MVK, also bei den Messungen mit durchlaufendem Tuner, wird der Tuner nicht über die Software gesteuert, sondern muss vom Anwender in Bewegung gebracht werden. Eine weitere erforderliche Routine ist die Funktion test. Hier wird die Funktion des EUT überprüft. Es werden, wie beschrieben, die Ein- und Ausschaltlevel sowie die Periodendauer des vom PC-Board ausgegebenen Signals überprüft. Die jeweilige Ober- und Untergrenzen der entsprechenden Werte werden der Funktion TestEUT übergeben und von dieser mit den vom Oszilloskop ausgebenen Werten verglichen. Diese Überprüfung der Oszilloskopdaten erfolgt bis zu fünf mal hintereinander, daher auch die Verschachtelung im Quellcode. Die mehrfache Überprüfung machte sich erforderlich, da das vom EUT erhaltene Signal nicht immer sauber erfasst wurde und dadurch angebliche EUT-Ausfälle gemeldet wurden, die nicht stattfanden. Wenn nach der fünften Überprüfung immer noch nicht das richtige Signal detektiert wird (Zeile 153) wartete die Testroutine 25 Sekunden auf ein evtl. selbstständiges Reset des EUT (Zeile 159). Wurde nach Ablauf der Zeitspanne das Signal immer noch nicht detektiert, wird in Zeile 166 mit Hilfe der Funtion doReset ein externes Reset des PCBoards über den Parallelport des Messrechners ausgelöst und abermals 25 Sekunden gewartet. Ist das Signal des EUT dann immer noch nicht da, hält das Programm mit einer Meldung an den Anwender an und wartet auf weitere Befehle(Zeile 175). Nach Überprüfung oder Instandsetzung des EUT kann die Messung mit Continue fortgesetzt werden. Wird nun oder auch schon während der vorherigen Prüfung festgestellt, das das EUT ein korrektes Ausgangssignal liefert, wird die Messung normal fortgesetzt. Es benötigt also etwas Zeit und Aufwand, um die automatische EUT-Überwachung ins Messprogramm zu integrieren, dafür vereinfacht es natürlich später den eigentlichen Messablauf erheblich. Es ist offensichtlich, dass bei gewünschten Änderungen im Messablauf oder bei der Überwachung anderer EUT die Kerneldatei editiert, also geändert werden muss. Anschließend muss sie, möglichst unter einem anderen aussagekräftigen Namen, im Messordner oder unter einem der in der Umgebungsvariable UMDPATH, die weiter oben beschrieben wurde, angegebenen Pfade, gespeichert werden. Die Zuweisung des aktuellen Messkernels erfolgt dann, wie beschrieben in der Konfigurationsdatei 3.2 in Zeile 4.
Das Messprogramm msc-immunity.py¶
Die im Messordner enthaltene Datei msc-immunity.py ist das eigentliche Messprogramm. Sie ist im folgenden Listing zu sehen. Diese Datei muss in der Regel nicht geändert werden, da Veränderungen am Messaufbau oder der Messparameter, wie z.B. der zu untersuchende Frequenzbereich durch Änderungen in der dot Datei bzw. in der Konfigurationsdatei dem Messprogramm mitgeteilt werden.
import os
import sys
import gzip
import pprint
try:
import cPickle as pickle
except ImportError:
import pickle
import MSC
import umddevice
import umdutil
cdict = {"autosave_filename": 'msc-autosave.p',
"pickle_output_filename": 'msc-immunity.p',
"pickle_input_filename": None,
"rawdata_output_filename": 'out_raw_immunity-%s.dat',
"processeddata_output_filename": 'out_processed_immunity-%s.dat',
"log_filename": 'msc.log',
"logger": ['stdlogger'],
"minimal_autosave_interval": 3600,
"descriptions": ['EUT'],
"measure_parameters": [{'dotfile': 'smallMSC-immunity.dot',
'calibration': 'empty',
'kernel': (None,{}),
'leveling': None,
'freqs': None,
'names': {'sg': 'sg',
'a1': 'a1',
'a2': 'a2',
'ant': 'ant',
'pmfwd': 'pm1',
'pmbwd': 'pm2',
'fp': [],
'tuner': ['tuner1'],
'refant': ['refant1'],
'pmref': ['pmref1']
}
}]
}
def myopen (name, mode):
if name[-3:] == '.gz':
return gzip.open(name, mode)
else:
return file(name, mode)
def update_conf (cdict):
try:
import config
cdict.update(config.cdict)
print "Configuration updated from 'config.py'."
except ImportError:
pass
if len(sys.argv)>1:
for name in sys.argv[1:]:
try:
d, nm = os.path.split(name)
_mod = __import__(nm[:nm.rindex('.')])
cdict.update(getattr(_mod, 'cdict'))
print "Configuration updated from '%s'."%name
except:
raise
try:
dct=eval(name)
if type(dct) == type({}):
cdict.update(dct)
print "Configuration updated from '%s'."%str(dct)
except:
pass
def load_from_autosave(fname):
msc=None
cmd=None
if os.path.isfile(fname):
try:
pfile = myopen(fname, "rb")
msc=pickle.load(pfile)
cmd=msc.ascmd
if msc:
msg = "Auto save file %s found.\ncmd: %s\n\nResume: Resume Measurement\nNew: Start new."%(fname, cmd)
but = ["Resume", "New"]
answer = msc.messenger(msg, but)
#answer=0
if answer == but.index('Resume'):
startnew = False
else:
del msc
del cmd
msc=None
cmd=None
except IOError, m:
# this is no problem
msc.messenger("IOError during check for autosave-file: %s\nContinue with normal operation..."%m, [])
except (UnpicklingError, AttributeError, EOFError, ImportError, IndexError), m:
# unpickle was not succesful, but we will continue anyway
# user can decide later if he want to finish.
msc.messenger("Error during unpickle of autosave-file: %s\nContinue with normal operation..."%m, [])
except:
# raise all unhadled exceptions
raise
return msc,cmd
def make_logger_list(msc, clogger):
logger = []
for _l in clogger:
_lst = _l.split('.') # _lst can be e.g. [stdlogger] or [custom, Filetablogger]
_mod=None
if len(_lst)==1:
# no module given
_mod = msc
elif len(_lst)==2:
try:
_mod = __import__(_lst[0])
except ImportError, m:
_mod = None
msc.messenger("ImportError: %s"%m, [])
if _mod:
try:
logger.append(getattr(msc,_l))
except AttributeError, m:
msc.messenger("Logger not found: %s"%m, [])
if not len(logger): #empty
logger=[msc.stdlogger] # fall back to stdlogger
return logger[:]
if __name__ == '__main__':
update_conf(cdict)
print "Configuration values:"
print
pprint.pprint (cdict)
msc,cmd=load_from_autosave(cdict['autosave_filename'])
if not msc:
if cdict['pickle_input_filename']:
pfile = myopen(cdict['pickle_input_filename'], "rb")
print "Loading input pickle file '%s'..."%cdict['pickle_input_filename']
msc=pickle.load(pfile)
pfile.close()
print "...done"
else:
msc=MSC.MSC()
msc.setLogFile(cdict['log_filename'])
logger = make_logger_list(msc,cdict['logger'])
msc.setLogger(logger)
msc.setAutoSave(cdict['autosave_filename'])
msc.SetAutoSaveInterval(cdict['minimal_autosave_interval'])
descriptions = cdict['descriptions'][:]
for _i,_des in enumerate(cdict['descriptions']):
try:
mp = cdict['measure_parameters'][_i]
except IndexError:
mp = cdict['measure_parameters'][0]
mp['description']=_des
domeas=True
doeval=True
if msc.rawData_Immunity.has_key(_des):
domeas=False
doeval=False
msg = """"
Measurement with description '%s' allready found in MSC instance.\n
How do you want to proceed?\n\n
Continue: Continue with Measurement.\n
Skip: Skip Measurement but do Evaluation.\n
Break: Skip Measurement and Evaluation.\n
Exit: Exit Application
"""%(_des)
but = ["Continue", "Skip", "Break", "Exit"]
answer = msc.messenger(msg, but)
#answer=0
if answer == but.index('Break'):
continue
elif answer == but.index('Exit'):
sys.exit()
elif answer == but.index('Continue'):
domeas=True
doeval=True
elif answer==but.index('Skip'):
domeas=False
doeval=True
else:
# be save and do nothing
continue
if domeas:
msc.Measure_Immunity(**mp)
if doeval:
msc.OutputRawData_Immunity(fname=cdict["rawdata_output_filename"]%_des)
msc.Evaluate_Immunity(description=_des)
msc.OutputProcessedData_Immunity(fname=cdict["processeddata_output_filename"]%("_".join(descriptions)))
else:
msg="Select description to use.\n"
but = []
for _i,_des in enumerate(cdict['descriptions']):
msg+='%d: %s'%(_i,_des)
but.append('%d: %s'%(_i,_des))
answer=msc.messenger(msg, but)
try:
mp = cdict['measure_parameters'][answer]
except IndexError:
mp = cdict['measure_parameters'][0]
mp['description']=cdict['descriptions'][answer]
exec(cmd)
if os.path.isfile(cdict['pickle_output_filename']):
msg = "Pickle file %s allready exist.\n\nOverwrite: Overwrite file\nAppend: Append to file."%(cdict['pickle_output_filename'])
but = ["Overwrite", "Append"]
answer = msc.messenger(msg, but)
if answer == but.index('Overwrite'):
mode = 'wb'
else:
mode = 'ab'
else:
mode = 'wb'
try:
msc.messenger(umdutil.tstamp()+" pickle results to '%s' ..."%(cdict['pickle_output_filename']), [])
pf = myopen(cdict['pickle_output_filename'], mode)
pickle.dump(msc, pf,2)
msc.messenger(umdutil.tstamp()+" ...done.", [])
except:
msc.messenger(umdutil.tstamp()+" failed to pickle to %s"%(cdict['pickle_output_filename']), [])
raise
else:
# remove autosave file after measurement is completed and class instance was pickled
try:
os.remove(cdict['autosave_filename'])
except:
pass
Zunächst werden wieder einige Module und plug-ins importiert. pickle ist zur Erzeugung der pickle-Dateien erforderlich. MSC und umddevice sind an der Universität Magdeburg programmierte Module zur Durchführung der einzelnen Messroutinen bzw. zur Kommunikation mit den Messgeräten. Danach erfolgt die Vorbelegung der Variablen des dictionaries mit defaultWerten. Diese werden dann später ggf. beim Einladen des Konfigurationsfiles aktualisiert. Anschließend werden einige Routinen definiert. Die Routine myopen liefert bei Aufruf die in der Variable name geforderte Datei zurück, sollte sie gepackt sein, wird sie vorher noch entpackt. Durch update_conf wird ein Update des Kofigurationsdictionaries durchgeführt, die bisherigen Einträge in dict also gegebenfalls durch neue Einträge ersetzt, die, in Abhängigkeit von der aufrufenden Routine, aus einer Autosavedatei, einer geladen pickle-Datei oder auch aus der mit dem Messprogramm aufgerufenen Konfigurationsdatei stammen können. Durch die Routine load_from_autosave wird eine Autosavedatei geladen. make_logger_list stellt eine Liste von für Protokolldateien zuständigen Routinen zur Verfügung. Dann beginnt in Zeile 133 das eigentliche Programm. In Zeile 133 beginnt dann das eigentliche Programm. Zunächst wird ein Update der Messvariablen durchgeführt und diese dann anschließend ausgegeben. Dann versucht das Messprogramm, eine Instanz der Klasse MSC zu erstellen. Hierzu wird zunächst mit Hilfe der Routine load_from_autosave überprüft, ob bereits eine Autosavedatei unter dem im Kofigurationsblockcdict angegebenen Namen existiert. Gibt es diese Autosavedatei, wird abgefragt, ob sie eingelesen werden soll und bei Bestätigung in Zeile 140 nach dem Einlesen der Daten der Autosavedatei die gespeicherte Instanz der Klasse MSC wieder erstellt. Der zweite zurückgelieferte Wert cmd liefert das Kommando zurück, das die Routine aufrief, in der die Autosavedatei erstellt wurde, also die Routine, die bei Speicherung der Daten gerade lief. Anschließend wird in Zeile 204 abgefragt, welche der unter verschiedenen Descriptions abgespeicherten Messungen man verwenden möchte. Anschließend werden die aktuellen Messparameter mp übergeben und in Zeile 216 die gespeicherte begonnene Messung mit dem erneuten Aufruf der in cmd gespeicherten letzten aufgerufenen Routine an der gesicherten Stelle weitergeführt. Gibt es keine Autosavedatei unter dem angegebenen Namen oder soll diese nicht benutzt werden, wird der Messordner nach dem im cdict angegebenen pickle-file durchsucht und dieses geladen. In diesem Fall würde dann aus den in der pickle-Datei enthaltenen Daten die Instanz der Klasse MSC wieder erzeugt werden. Anschließend werden ab Zeile 151 dieser Instanz die Konfigurationen, measurement_parameters und evaluation_parameters aus dem cdict übergeben. Nun wird untersucht, ob in dieser Instanz bereits Messungen unter der description abgelegt sind, die für die aktuelle Messung laut Konfigurationsdatei benutzt werden sollen. Dies kann natürlich nur beim Laden eines alten pickle-files der Fall sein. Wird eine Messung gefunden, wird diese mit der entsprechenden description ausgegeben und in Zeile 176 abgefragt, wie weiter zu verfahren ist. Es besteht die Möglichkeit, die aktuelle Messung weiterzuführen (Continue). Weiterhin kann die aktuelle Messung abgebrochen und mit der Auswertung der vorhandenen Daten fortgefahren werden (Skip). Es ist es ebenfalls möglich, sowohl die aktuelle Messung als auch die Auswertung abzubrechen (Break) oder das Messprogramm komplett zu beenden (Exit). Wird ein Fortsetzen der Messungen gewählt, würde der alte Datensatz aus dem picklefile überschrieben werden und die Routine msc.Measure_Immunity führt die Messung mit den in mp übergebenen Messparametern vom Zeitpunkt der erfolgten Sicherung an fort. Anschließend, bzw. wenn nur die Auswertung der Daten ausgewählt wurde, erfolgt in den Zeilen 201203 erst durch die Routine msc.OutputRawData_Immunity die Ausgabe der Rohdaten in die im Konfigurationsblock cdict unter rawdata_output_filename angegebene Datei, anschließend durch die Routine msc.Evaluate_Immunity mit den in ep übergebenen Parametern die Auswertung der Daten und schließlich durch durch die Routine msc.OutputProzessedData_Immunity die Ausgabe der ausgewerteten und geordneten Daten in die im Konfigurationsblock cdict unter prozesseddata_output_filename angegebene Datei. Sollten keine Sicherungsdateien vorhanden oder gewünscht werden, wird die eine neue Instanz der Klasse MSC erstellt und eine neue Messung mit den eben angesprochenen Routinen der Klasse MSC begonnen und anschließend ausgewertet. Diese Messung erhält dann als Bezeichnung den ersten Eintrag der Liste descriptions aus dem Konfigurationsblock. Die Messung wird dann für alle weiteren in description eingetragenen Bezeichnungen wiederholt. Nachdem mit der Ausgabe der Daten die Auswertung abgeschlossen ist, wird eine abschließende pickle-Datei angelegt, die alle bisherigen Messungen dieser Instanz der Klasse enthält, also die soeben beendete Messung samt Auswertung, sowie die, die in einer evtl. zuvor eingelesen Sicherungsdatei (Input-pickle-Datei oder autosavedatei) gespeichert waren. Der Name dieser Output-pickle-Datei wurde ebenfalls in der Konfigurationsdatei festgelegt. Zunächst wird in Zeile 218 geprüft, ob es bereits eine Datei unter diesem Namen gibt. Falls das der Fall ist, wird abgefragt, ob diese evtl. überschrieben werden soll, oder ob die neue pickle-Datei einfach an die vorhandene Datei angehängt werden soll. Nachdem die komplette Messung als Outputpickle-Datei gesichert wurde, wird letzlich noch die evtl. vorhanden Autosavedatei gelöscht, da sie ja durch die beendete Messung und Auswertung nicht benötig wird. Achtung: Wird die Messung aus einer Autosavedatei gestartet, wird nach Abschluss der Messung keine Auswertung ausgeführt, sondern nur das Output-pickle-file erstellt. In diesem Fall muss die Messung mit diesem Output-pickle-file als Input-pickle-file nocheinmal gestartet werden. Dann würde, wie oben beschrieben, die Meldung, dass im eingelesenen pickle-file bereits eine Messung mit der aktuellen description vorhanden ist und die Abfrage, was geschehen soll, erscheinen. Durch Auswahl von Skip wird dann die aktuelle Messung abgebrochen und es werden nur die vorhandenen Daten aus der gespeicherten Messung ausgewertet und man erhält so die Roh- und Ergebnisdaten. Das Messprogramm kann während der Messung jederzeit durch Drücken einer Taste gestoppt werden. Dies wird auch akustisch signalisiert. Der Ausgangssignal des Signalgenerators wird abgeschaltet, die Kammer kann also geöffnet und auch betreten werden. Gleichzeitig erfolgt eine Abfrage, wie weiter zu verfahren ist. Mit Continue kann die Messung fortgesetzt werden. Mit Suspend werden die Geräte vom Bus abgemeldet, die Instanz bleibt jedoch aktiv, da das Messprogramm auf weitere Eingaben wartet. Die Geräte können ausgeschaltet und auch aus dem Aufbau entfernt werden. Dies kann zum Beispiel genutzt werden, um die Akkus der Sonden zu laden oder Geräte kurzzeitig für andere Messungen zu benutzen, ohne dafür das Messprogramm unterbrechen zu müssen. Der Rechner darf jedoch während dieser Zeit nicht ausgeschaltet werden, da das Messprogramm ja noch läuft. Nachdem alle Geräte wieder angeschlossen und eingeschaltet sind, kann die Messung fortgesetzt werden. Hierzu werden alle Geräte neu initialisiert und die Messung läuft weiter. Mit Quit kann die Messung auch beendet werden. Die folgende Abbildung zeigt den Inhalt des Messordners nach Abschluss der Messung:
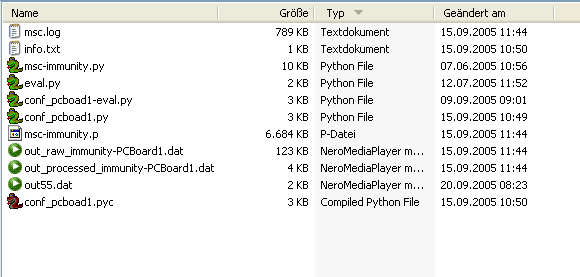
Messordnerinhalt nach Abschluss der Messungen¶
Man sieht also zusätzlich die beiden Ausgabedateien out_raw_immunity-PCBoard1.dat und out_processed_immunity-PCBoard1.dat, sowie aus Output-pickle-file msc-immunity.p und die Protokolldatei msc.log.